Laser radar 3D point cloud ground detection method
A technology of laser radar and ground detection, which is applied in the direction of measuring devices, radio wave measuring systems, instruments, etc., can solve problems such as difficult to achieve the expected ground filtering effect, and achieve the effect of improving operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
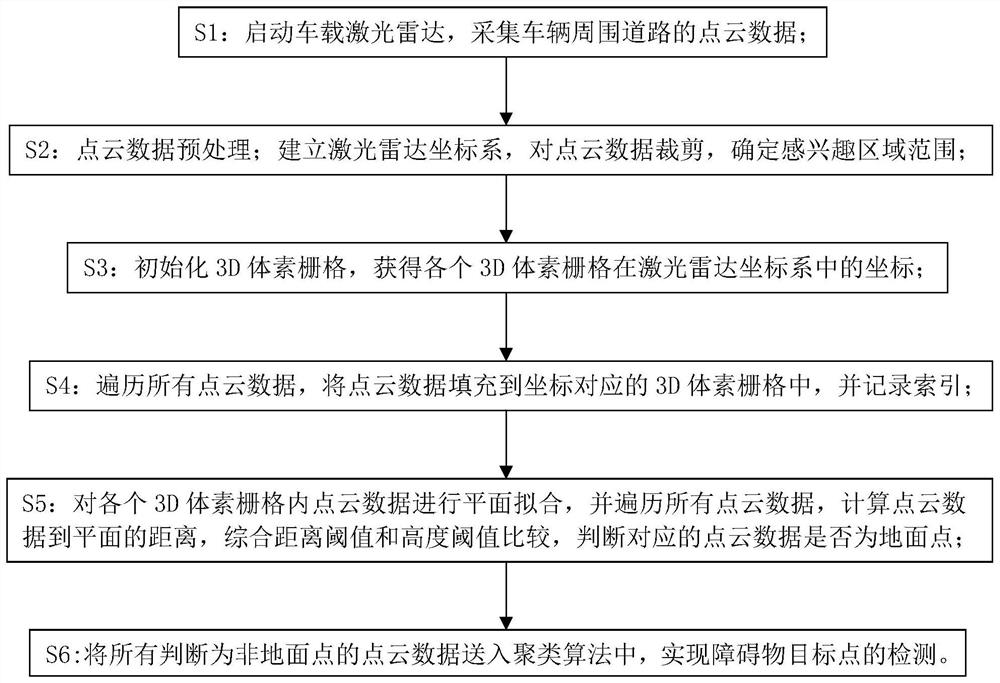
[0053] A kind of lidar 3D point cloud ground detection method of this embodiment, such as figure 1 shown, including the following steps:
[0054] S1: Start the on-board lidar to collect point cloud data of the roads around the vehicle.
[0055] After the lidar (mechanical or solid-state) is mounted on the vehicle, start the lidar drive, and the lidar will obtain the 3D point cloud data information of the surrounding roads while the vehicle is driving, and upload the point cloud data to the system for storage .
[0056]S2: Point cloud data preprocessing; establish the lidar coordinate system, cut out the point cloud data, and determine the scope of the region of interest.
[0057] After receiving the point cloud data, the point cloud data will be preprocessed.
[0058] The preprocessing of point cloud data includes clipping the point cloud data, leaving only the point cloud data within the region of interest. The scope of the region of interest is adjusted according to the ...
Embodiment 2
[0088] The solution of this embodiment optimizes step S5.
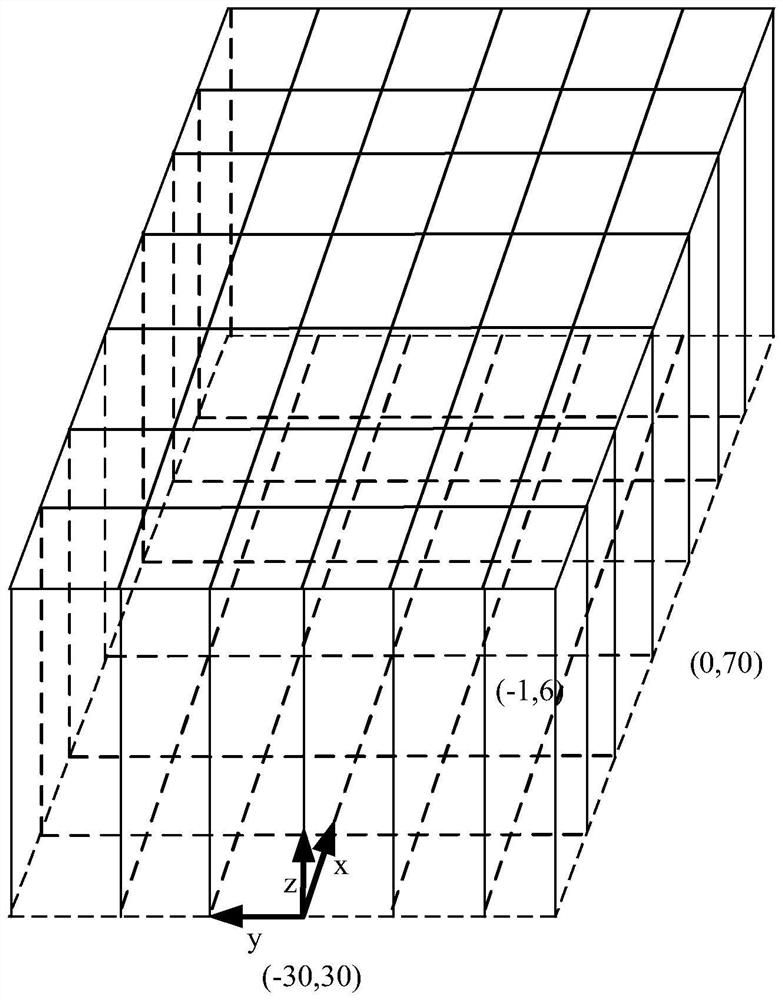
[0089] After the process of step S4, after obtaining the index and coordinates of the point cloud data in each 3D voxel grid in the lidar coordinate system, the point cloud data in the 3D voxel grid is converted into the two-dimensional coordinate system point, i.e. set all X values to 0.
[0090] Sort the point cloud data according to the Z-axis coordinate value from small to large, and select the first five point cloud data;
[0091] Perform straight line fitting on the Y and Z coordinates of the selected five point cloud data. If there are ground points, a straight line will be fitted;
[0092] Calculate the distance from other point cloud data to the fitted straight line, if the calculated distance is less than the distance threshold D1, then judge the point cloud data to be a ground point, otherwise judge it to be a non-ground point.
[0093] In the solution of this embodiment, step S5 is optimized, and other...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More