Multi-boat two-layer cooperative automatic control contraction pursuing method
A technology of motion direction and unmanned boat, applied in non-electric variable control, control/adjustment system, two-dimensional position/channel control, etc., can solve problems such as large differences and lack of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
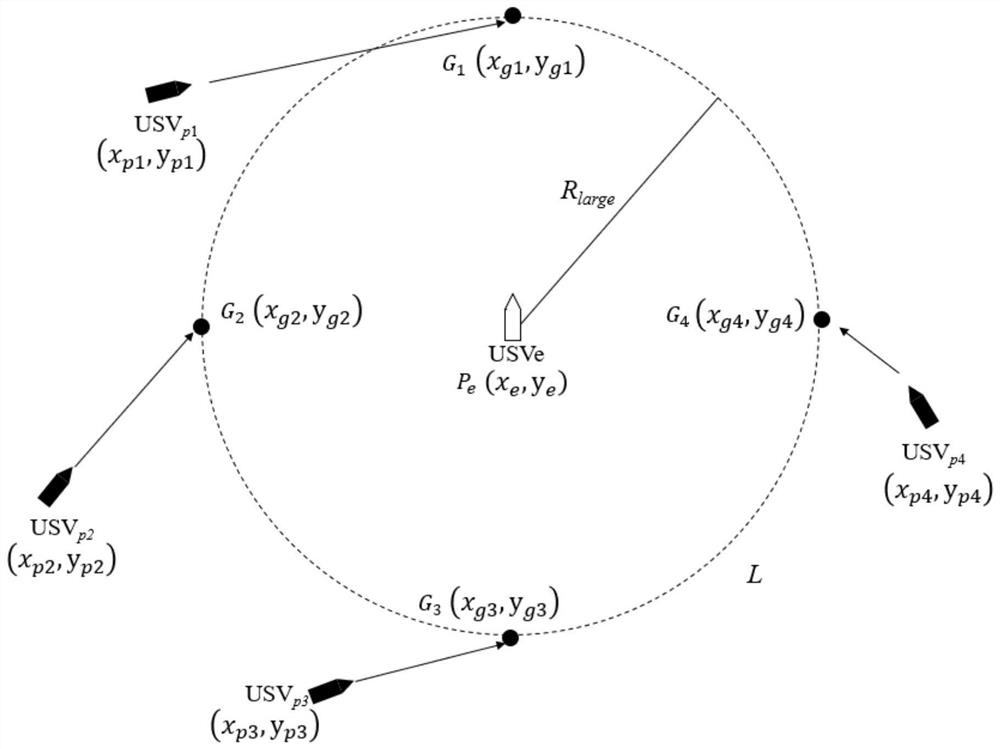
[0029] The hunting environment is simplified to a two-dimensional plane, and the hunting unmanned boat and the escaped ship can detect each other, that is, the location information is transparent and open. The position coordinate of the i-th pursuit unmanned boat is P pi (x pi ,y pi ), with velocity v pi , the direction of motion is β pi , r_USV p is the maximum radius of hunting unmanned boats, i∈[1,N], N is the number of hunting unmanned boats. The escape ship's position coordinates are P e (x e ,y e ), with velocity v e , the direction of motion is β e , r_USV e is the maximum radius of the fleeing ship. The purpose of chasing unmanned boats is to round up escaped ships, and the judgment mark is that all chased unmanned boats reach around the escaped ships and the distance is greater than or equal to R small . Assuming that the pursuit of unmanned boats is evenly distributed in the center of the circle with the escaped ship as the center, R small On a circle w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



