

Parallel robot for picking safflower carthamus
A robot and parallel technology, applied in the direction of picking machines, harvesters, agricultural machinery and tools, etc., can solve the problems of difficulty in picking workers, impact on harvesting efficiency, and impact on the economic benefits of safflower planting, so as to liberate the labor force and improve production efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
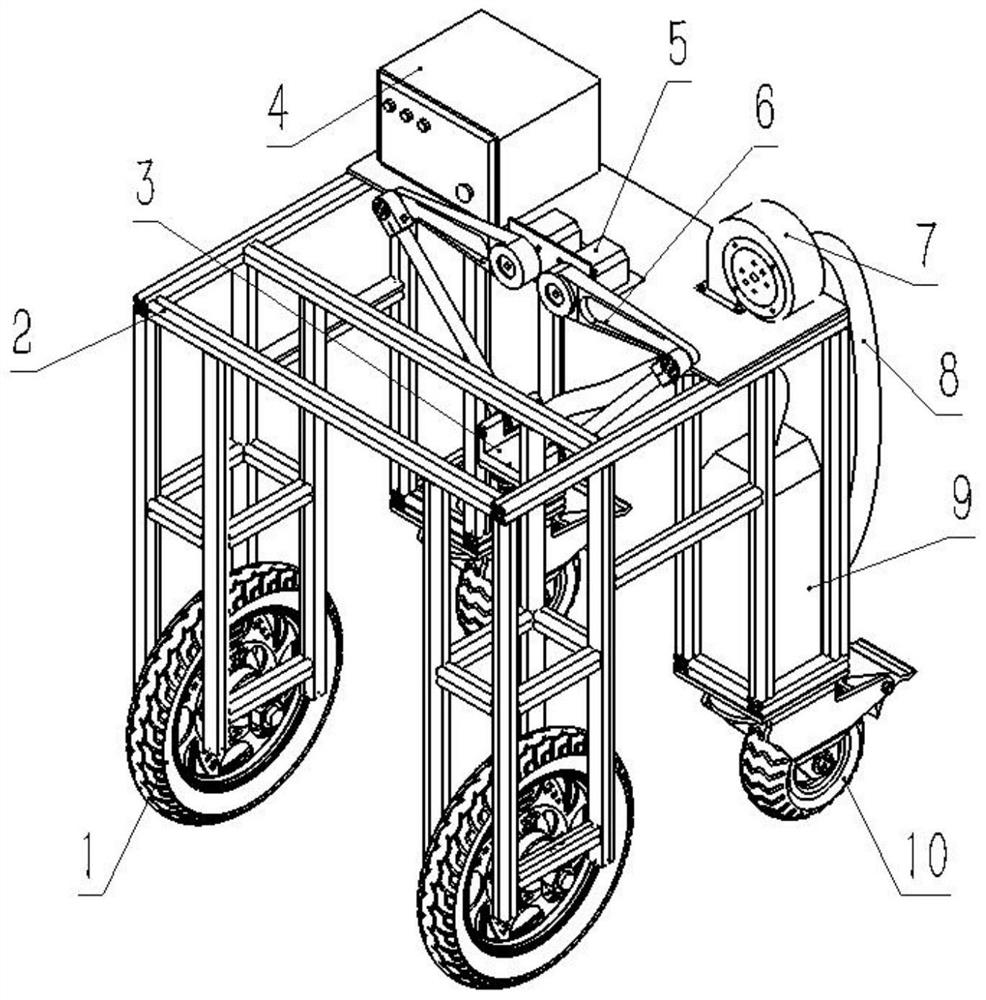
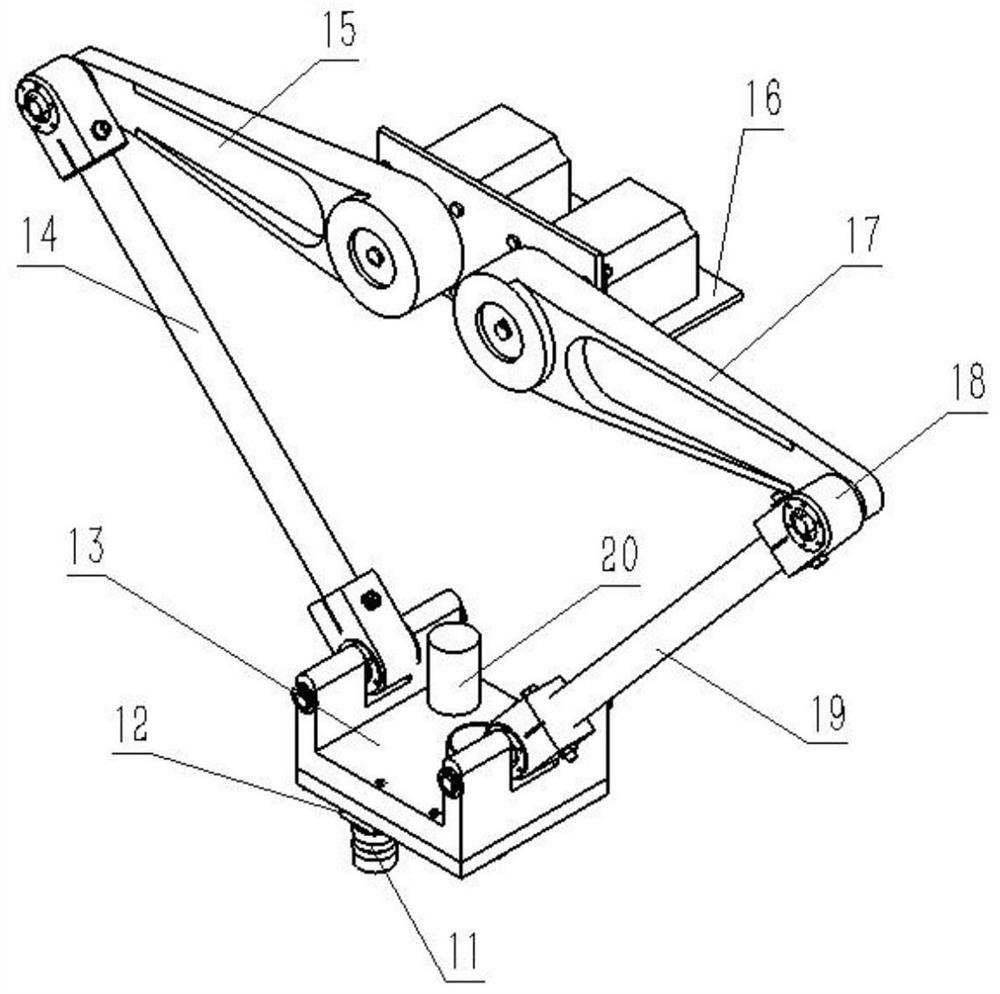
[0021] refer to Figure 1-4 As shown, the present invention provides an embodiment: a parallel robot for safflower picking, including a walking device, a parallel mechanical arm device (5), an image acquisition device, a picking device (3), a filament collecting device and a control device (4 ), the running device is located under the car body, including the frame (2), two motor wheels (1) and universal wheels (10), the wheels and the frame (2) are connected by bolts, and the motor wheel (1 ) are respectively installed on the left and right sides of the front of the rack (2), and the universal wheels (10) are respectively installed on the left and right sides of the rear of the rack (2). The left and right wheels respectively support the frame (2) and straddle the safflower planting rows. The parallel mechanical arm device (5) is located in the middle space of the frame (2), including the stepping motor (16), the first active arm (15), second master arm (17), first slave arm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More