

Swing arm track driving device of mobile robot
A mobile robot, crawler-driven technology, applied in the field of robots, can solve the problems of difficulty in fully exerting advantages, large volume and weight of the transmission structure, and achieve the effects of compact size, improved load capacity, and simple transmission structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
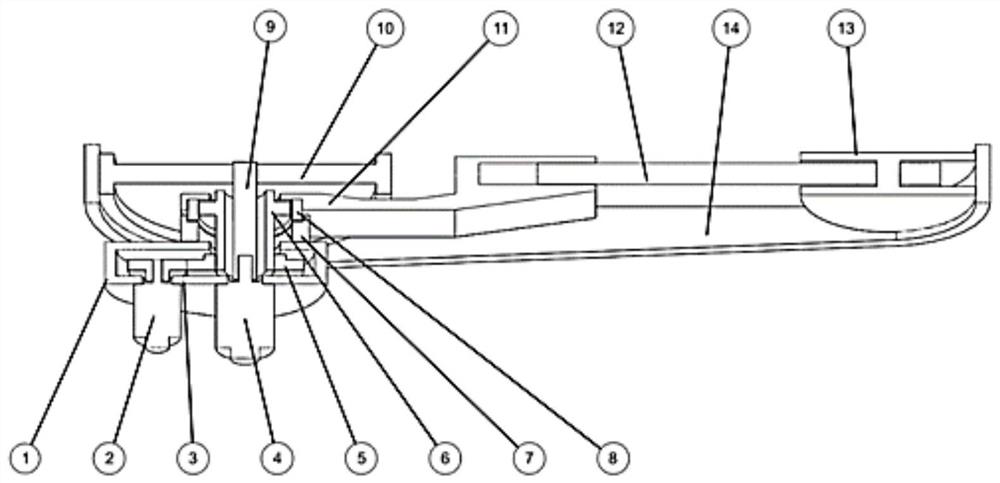
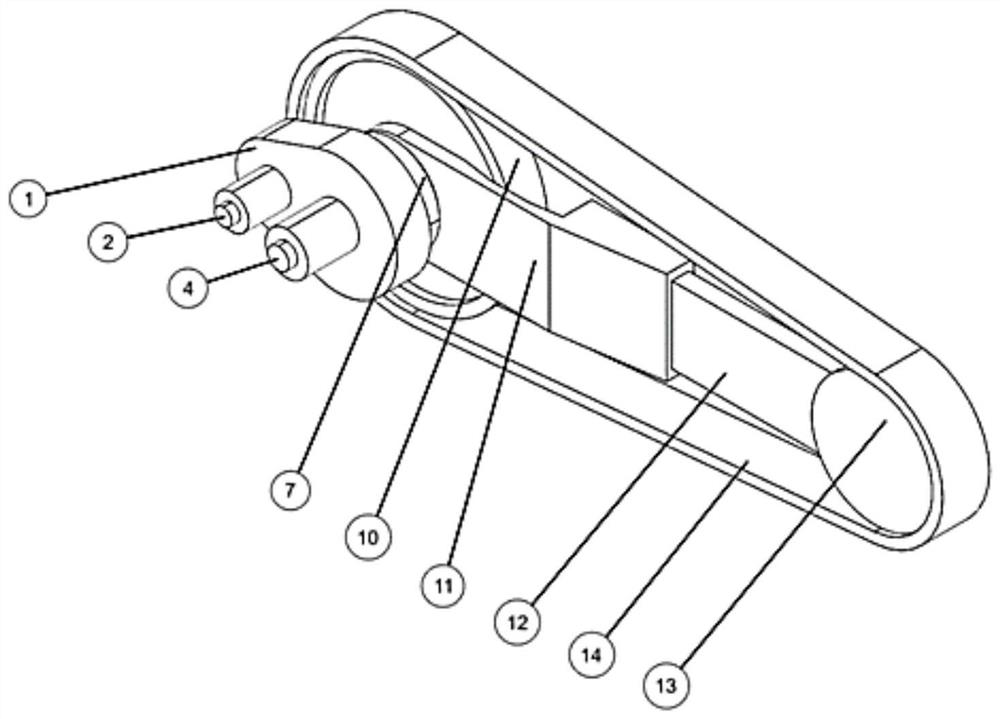
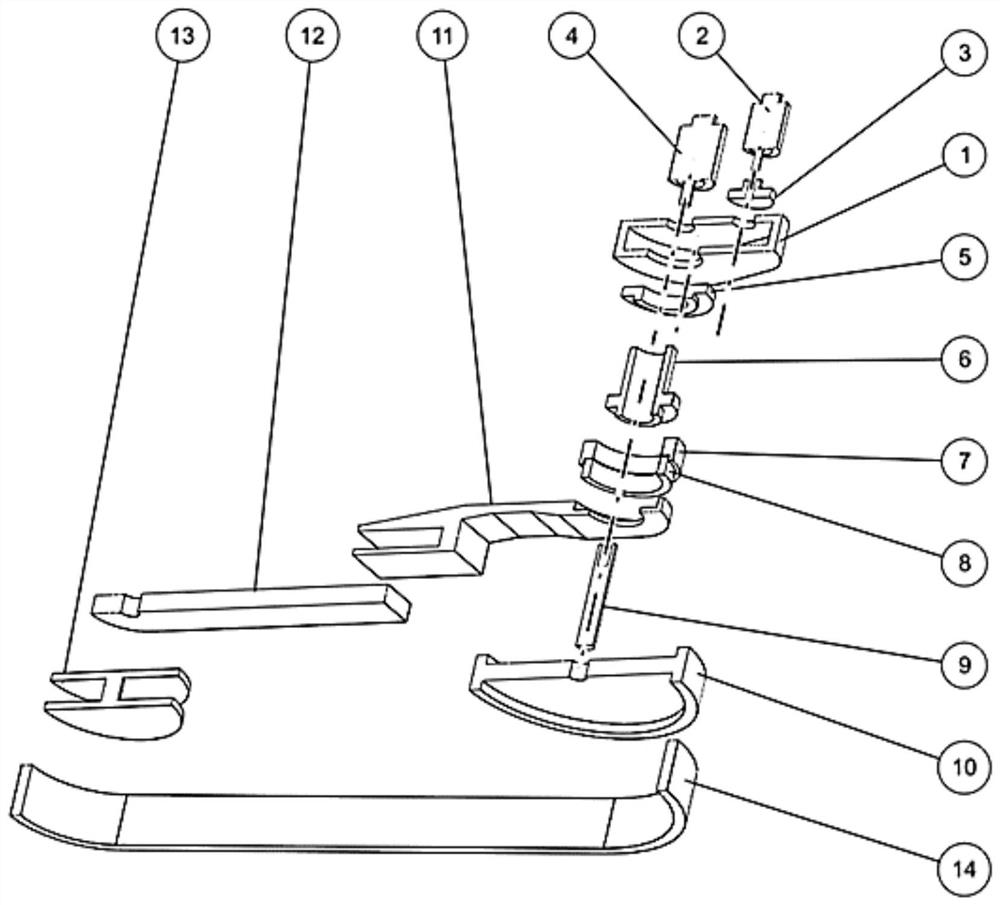
[0015] like Figure 1 to Figure 3 As shown, this embodiment includes: a hollow shaft harmonic reducer, a crawler drive structure and a swing arm drive structure, wherein: the crawler drive wheel shaft 9 of the crawler drive structure is arranged in the hollow input shaft 6 of the hollow shaft harmonic reducer, and the swing The arm drive structure is arranged outside the hollow shaft harmonic reducer, and the power structures of the three are arranged on the base 1. The swing arm drive structure and the crawler drive structure are coaxially driven to output rotational effects respectively.
[0016] The hollow shaft harmonic reducer includes: a hollow input shaft 6, a fixed end 7 of the harmonic reducer and an output end 8 of the harmonic reducer, wherein: the hollow input shaft 6 meshes with the output end 8 of the harmonic reducer, and the harmonic The fixed end 7 of the wave reducer is in contact with the output end 8 of the harmonic reducer and is arranged outside the base ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More