Multi-agent system robust affine mobile formation control method
A multi-agent system and control method technology, applied in non-electric variable control, control/regulation system, three-dimensional position/channel control, etc., to achieve the effect of rapid formation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
[0041]下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
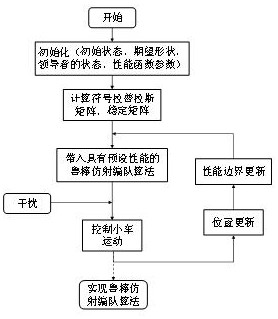
[0042]本发明公开了一种多智能体系统鲁棒仿射机动编队控制方法,图1为本发明实现步骤的流程框图,具体如下:
[0043]步骤1:初始化,
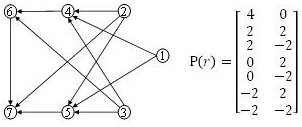
[0044](1)首先设置期望队形,进而确定智能体之间的相对位置偏差,如图2给出了七个智能体的队形矩阵,进而计算得到智能体位置与期望编队之间的位置偏差。
[0045](2)其次需要设置领导者二维平面上沿X轴与Y轴运动所需的速度,合理规划领导者的速度使之可以实现队形的平移,旋转以及缩放。
[0046](3)最后需要设定智能体的起始位置,领导者的状态与期望相同,跟随者的初始状态与期望编队有偏差,为更好的检验本发明提出的编队控制方法的有效性,跟随者起始位置与期望队形的误差不大于。
[0047]步骤2:计算符号拉普拉斯矩阵以及稳定矩阵。
[0048]由上述的期望队形r,则非对角权重可由下式计算:
[0049]
[0050]即可得拉普拉斯矩阵。
[0051]稳定矩阵的定义如下:
[0052]
[0053]其中是使矩阵特征值位于右半复平面的对角矩阵。
[0054]步骤3:设计预设性能算法。
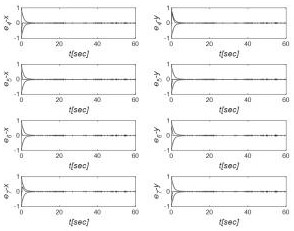
[0055]预设性能部分主要是对多智能体系统的误差设定性能包络,在这里假设系统的初始误差小于1。通过设定误差变换函数将系统的误差转换为随着误差的增加而增加的单调函数。
[0056]
[0057]
[0058]
[0059]其中为第i个智能体的控制增益,性能函数,其中、和ai为待设定的正常数;误差变换函数,定义误差为,。
[0060]步骤4:设计具有预设性能的鲁棒放射编队算法。
[0061]设计算法的目的是使多智能体系统的所有跟随者可以再存在外部干扰的情况下仍能够与期望编队的位置实现一致性。
[0062]
[0063]
[0064]
[0065]其中i表示第i个智能体,且;是控制输入,,表示第i个智能体的内邻居集合,分别表示智能体i和j的状态。
[0066]将预设性能函数与仿射编队算法融合,得到具有预设性能的鲁棒仿射编队算法,有效解决了仿射编队算法的鲁棒性,在存在外部干扰的情况下仍可以实现队形变换的编队,增强了在现实工程应用中的实...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More