Fire-fighting unmanned aerial vehicle formation sliding mode control method based on event triggering
An event-triggered and control method technology, applied in attitude control, adaptive control, general control system, etc., can solve the problem of rapid performance degradation, inability to take into account the attitude control and position control of fire-fighting drones, and the update of drone controllers problem of many times
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0087] The positional relationship described in the drawings is only for illustrative purposes and cannot be construed as a limitation to this patent;
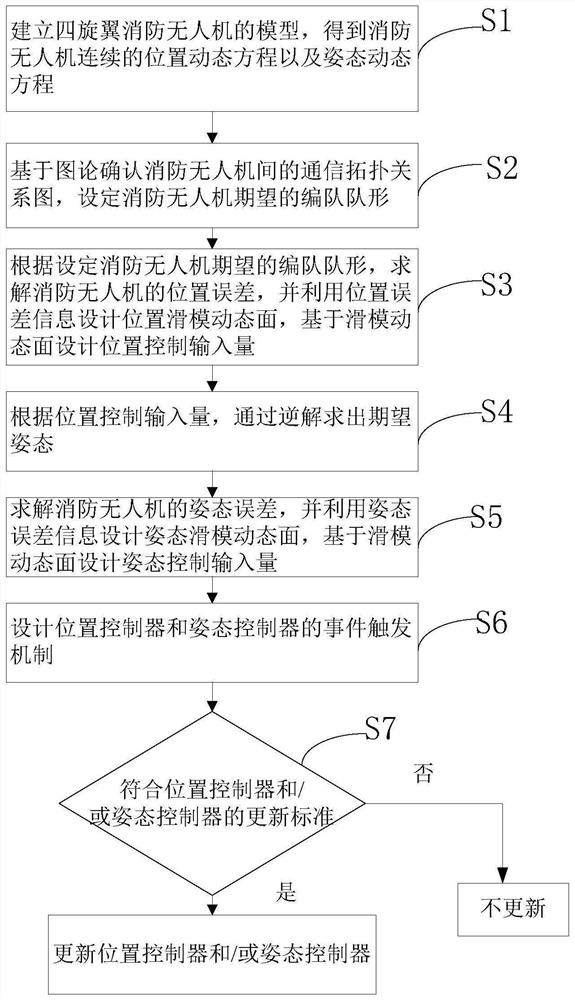
[0088] Such as figure 1 The flow diagram of the shown event-triggered fire-fighting UAV formation synovial control method, see figure 1 , the steps of the method include:
[0089] S1. Establish the model of the four-rotor fire-fighting drone, and obtain the continuous position dynamic equation and attitude dynamic equation of the fire-fighting drone. The expressions are:
[0090]
[0091] Among them, i represents the i-th fire-fighting drone, i=1,...,N, N represents the number of fire-fighting drones; P i =[x i ,y i ,z i ] T and V i =[v ix ,v iy ,v iz ] T Respectively represent the coordinates and speed of the fire-fighting drone i in the inertial coordinate system, Indicates the phasor form; g is the acceleration of gravity, e 3 =[0,0,1] T , m i is the quality of the i-th fire-fighting drone; Θ i =[φ i ,θ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More