Logistics vehicle and trailer pose determination, pre-collision detection and automatic driving method thereof
A determination method and technology for logistics vehicles, which are applied in vehicle position/route/height control, motor vehicles, transportation and packaging, etc., can solve problems such as inability to achieve good results, inability to obtain trailer position and orientation information of logistics vehicles, and running status of trailer systems. Can't get directly etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments.
[0061] Examples of logistics vehicles:
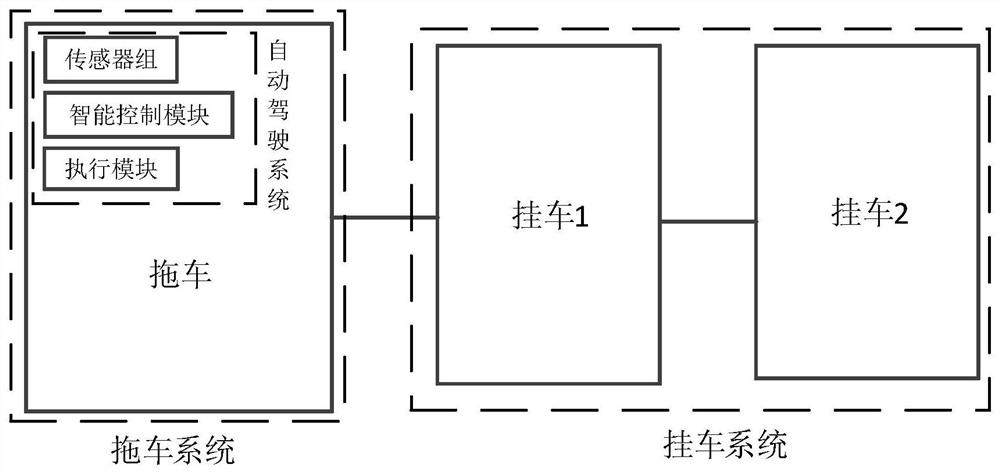
[0062] The logistics vehicle of this embodiment is as figure 1 As shown, the logistics vehicle includes a trailer system and a trailer system, the trailer system is composed of a trailer, and the trailer system can be composed of one or more trailers (this embodiment takes two trailers as an example), the trailer system and trailer system of the logistics vehicle are only Hinged together by a pin, there is no other way to connect the two. Among them, the trailer system provides the required braking force and driving force for the logistics vehicle, the trailer system only has a mechanical structure, and the automatic driving system of the logistics vehicle is only deployed on the trailer system, not on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More