

Unmanned vehicle tracking planning route adjusting method and terminal
A technology for planning routes and adjustment methods, applied in two-dimensional position/channel control, etc., can solve problems such as low efficiency, tediousness, and deviation of routes, and achieve the effect of enhancing interactivity and improving adjustment efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
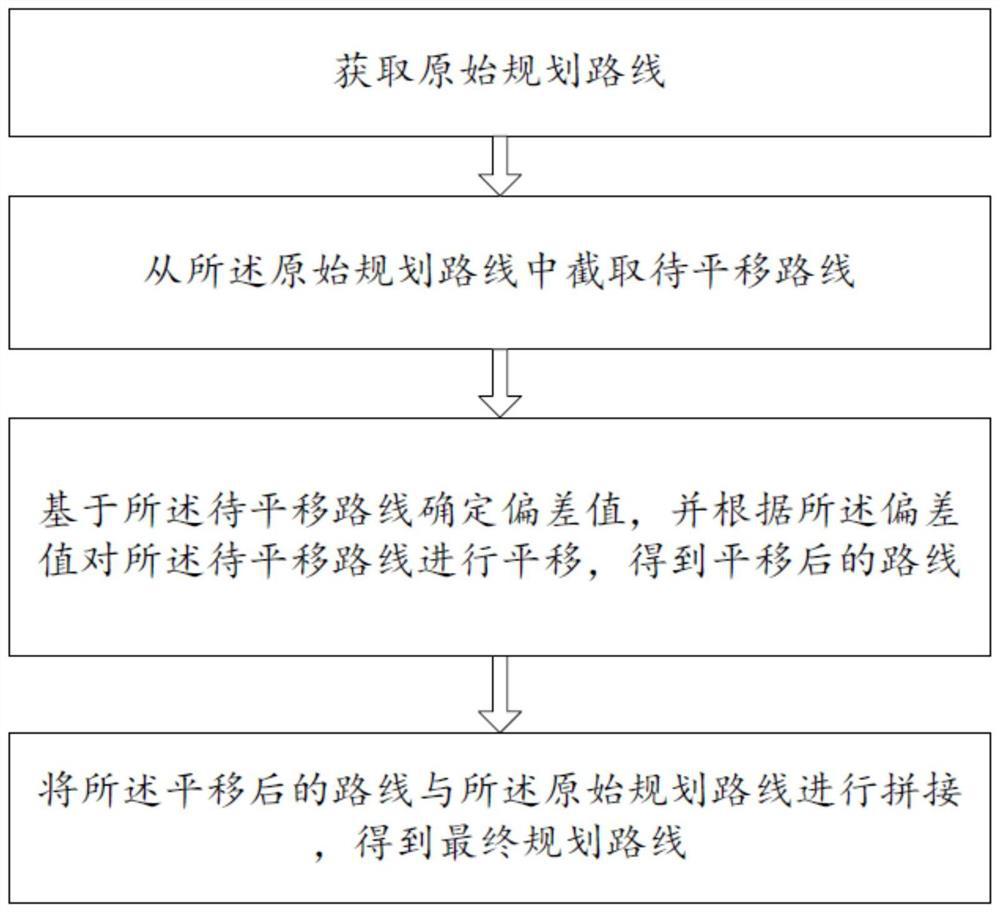
[0074] Please refer to figure 1 and image 3 , an adjustment method for an unmanned vehicle tracking planning route in this embodiment, comprising the steps of:
[0075] S1. Obtain the original planned route;
[0076] Wherein, the original planned route includes an original planned route point set (originPath);
[0077] S2, intercepting the to-be-translated route from the original planned route, specifically including:
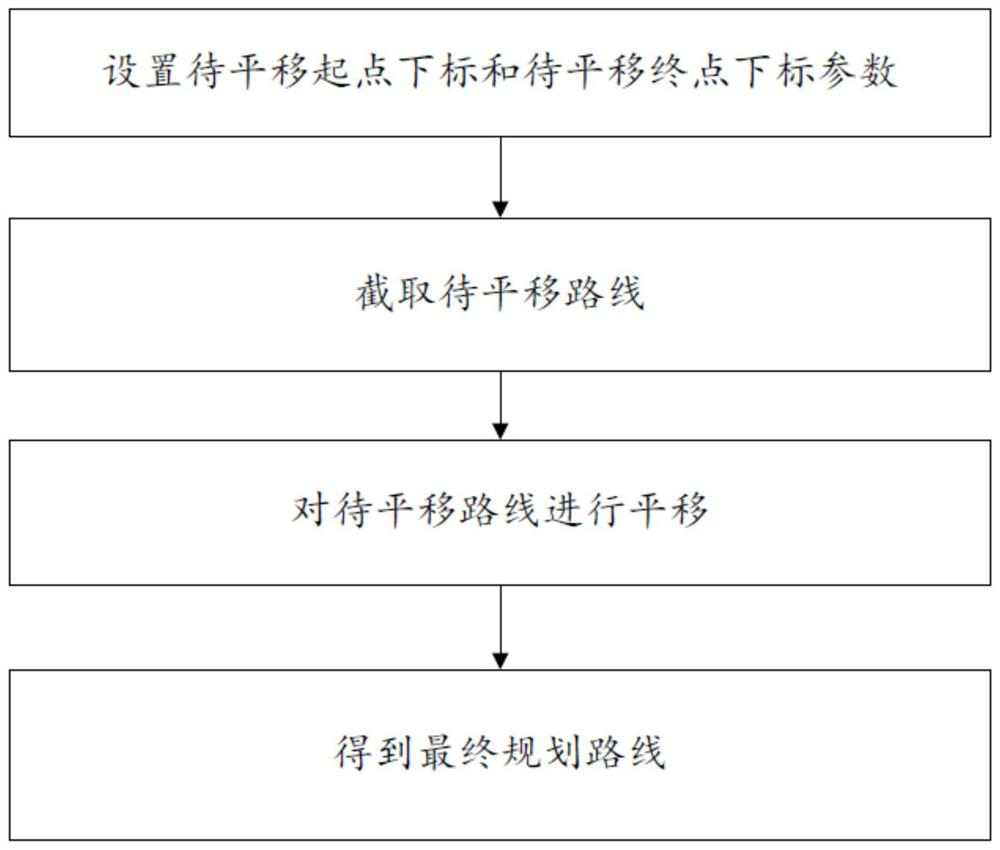
[0078] S21, receiving the subscript of the starting point to be translated and the subscript of the end point to be translated;
[0079] Specifically, as image 3 As shown, the operating user sets the parameters of the starting point index (tranBeginIndex) to be translated and the end index (tranEndIndex) of the route to be translated on the command platform interface, and the command platform receives tranBeginIndex and tranEndIndex;
[0080] S22, intercept the route to be translated from the original planned route according to the subscript of the start...
Embodiment 2
[0143] Please refer to figure 2 , an adjustment terminal for an unmanned vehicle tracing and planning a route in this embodiment includes a memory, a processor, and a computer program stored in the memory and running on the processor, and the processor executes the computer program At the same time, each step in the adjustment method of the unmanned vehicle tracking planning route in the first embodiment is realized.
[0144] To sum up, the present invention provides an adjustment method and terminal for an unmanned vehicle to track a planned route, obtaining an original planned route; intercepting a to-be-translated route from the original planned route; and determining a deviation value based on the to-be-translated route , and translate the route to be translated according to the deviation value to obtain the translated route, without the need to re-plan the entire route, the planned route can be offset or partially translated, so as to realize the tracking planning route....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More