Control method and device for automatic lane changing of vehicle
A control method and a technology of a control device, applied in the field of automatic driving, can solve problems such as logic control is not considered, and achieve a comprehensive effect of automatic lane change control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
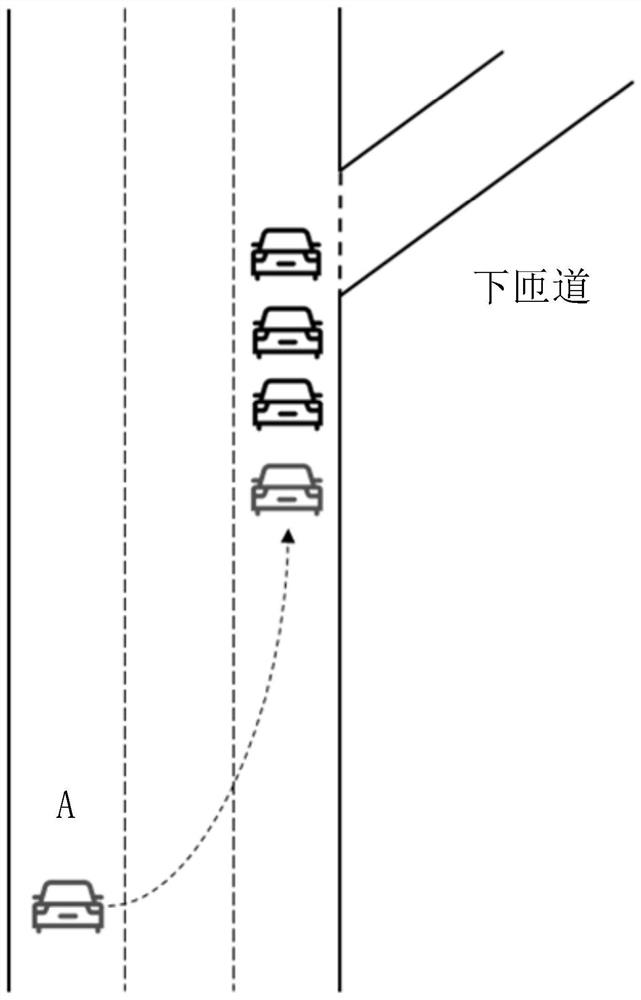
[0060] See image 3 , image 3 Shown is a schematic diagram of the vehicle changing road conditions in the first embodiment of the present invention. The vehicle (lane changing vehicle A in the figure) generates a navigation map-based lane change request that needs to be off-ramp according to the navigation destination to the right, but at this time The vehicle detects a traffic jam at the intersection, and generates a lane change request based on driving efficiency according to the driver's overtaking habit. The lane change operation corresponding to the two lane change needs conflicts. At this time, according to the preset priority, the vehicle will not turn left. Skip the line of traffic and instead wait in line until you get onto the off-ramp.
Embodiment 2
[0062] See Figure 4 , Figure 4 Shown is a schematic diagram of the vehicle changing road conditions in the second embodiment of the present invention. The vehicle (lane changing vehicle A in the figure) generates a navigation map-based lane change request that needs to be off-ramp according to the navigation destination to the right, but at this time There are many vehicles in the queue, and the driver actively intervenes to control the vehicle to the left. After the high-priority lane change to the left is completed, the vehicle will continue to execute the low-priority lane-change request, that is, according to the lane-change request based on the navigation map, Control the vehicle until you enter the off-ramp.
Embodiment 3
[0064] See Figure 5 , Figure 5 Shown is a schematic diagram of the vehicle changing road conditions in the third embodiment of the present invention. The vehicle (lane changing vehicle A in the figure) generates a navigation map-based lane change request that needs to be off-ramp according to the navigation destination to the right, but at this time There are many vehicles in the queue, and the driver actively intervenes to control the vehicle to the left. After the high-priority lane change to the left is completed, the vehicle detects a stationary obstacle M ahead. At this time, there is a lane change requirement based on safe avoidance to the left. The lane change request based on the navigation map is to the right. According to the preset priority, the vehicle will suppress the low priority left lane change request based on safe avoidance, and output the high priority right lane change request based on the navigation map. .
[0065] Another embodiment of the present in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com