

Six-freedom remote control arm with gravity compensation and length regulation
A technology of gravity compensation and remote operation, applied in the field of robots, can solve the problems of gravity affecting the adaptability of different operators, and achieve the effects of light weight, convenient operation and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The working process of the whole data arm controller is as follows:
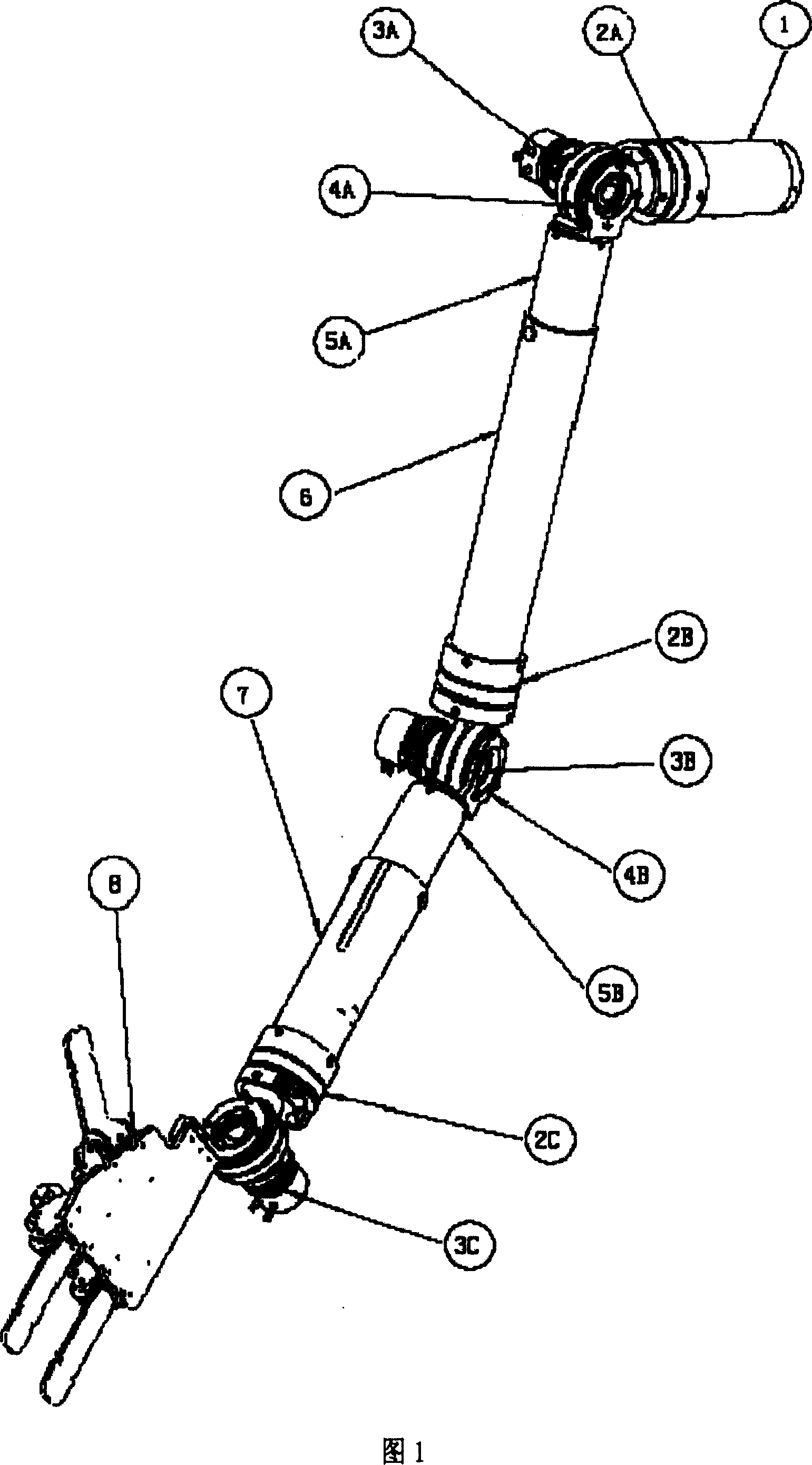
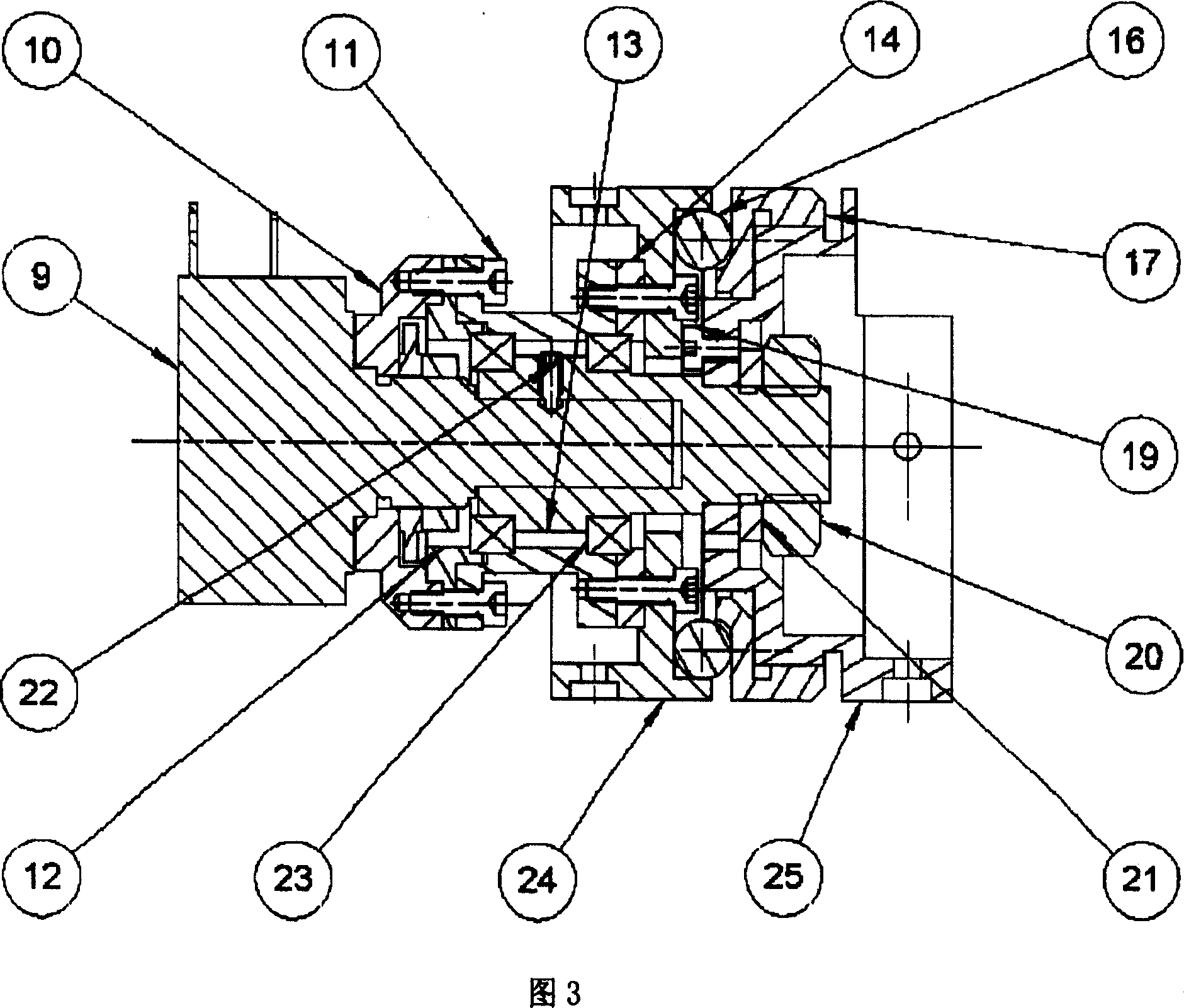
[0032] 1. Before the operation starts, the shoulder 1 of the data arm mechanism will be fixed on the operation platform, and the friction discs 17 of each rotary joint will be rotated to adjust the friction force to an appropriate level.
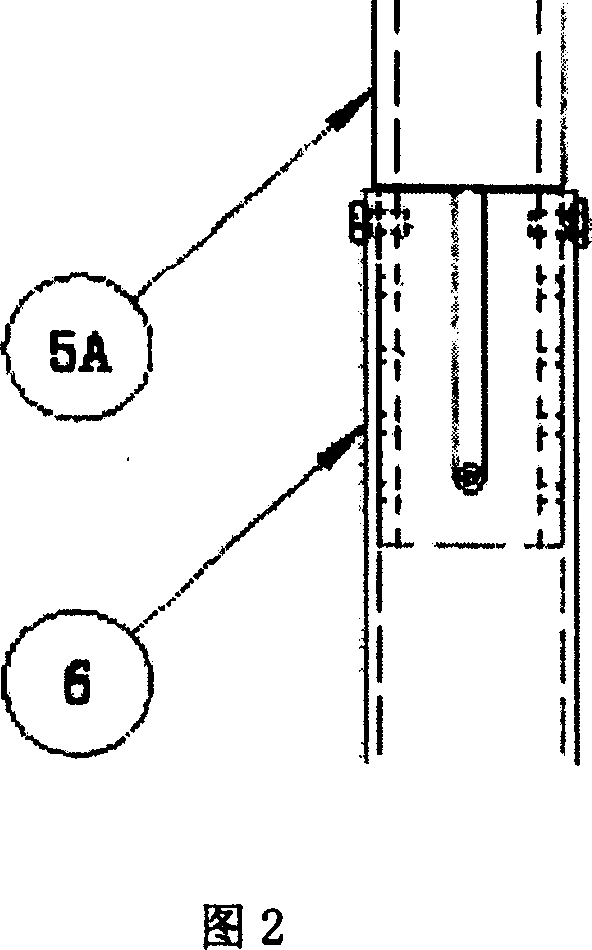
[0033] 2. Adjust the length of the big arm and small arm of the data arm mechanism according to the operator's arm length.
[0034] 3. Keep the upper arm of the operator's right arm straight, the forearm extended flat, and the palm extended flat to the left. The angle between the upper arm and the lower arm is 90 degrees. Place the operator's shoulders under shoulder 1 of the data arm mechanism. The big arm of the data arm mechanism is on the right side of the operator's big arm; and the operator's wrist joint is above the wrist joint of the data arm mechanism.
[0035] 4. Use adhesive hooks to fix the operator's shoulder, arm, hand, and fingers to the correspond...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More