

Magnetic roller adsorption type wall climbing robot
A wall-climbing robot and adsorption technology, applied in the field of robotics, can solve problems such as incompatible flexible movement and high-precision detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
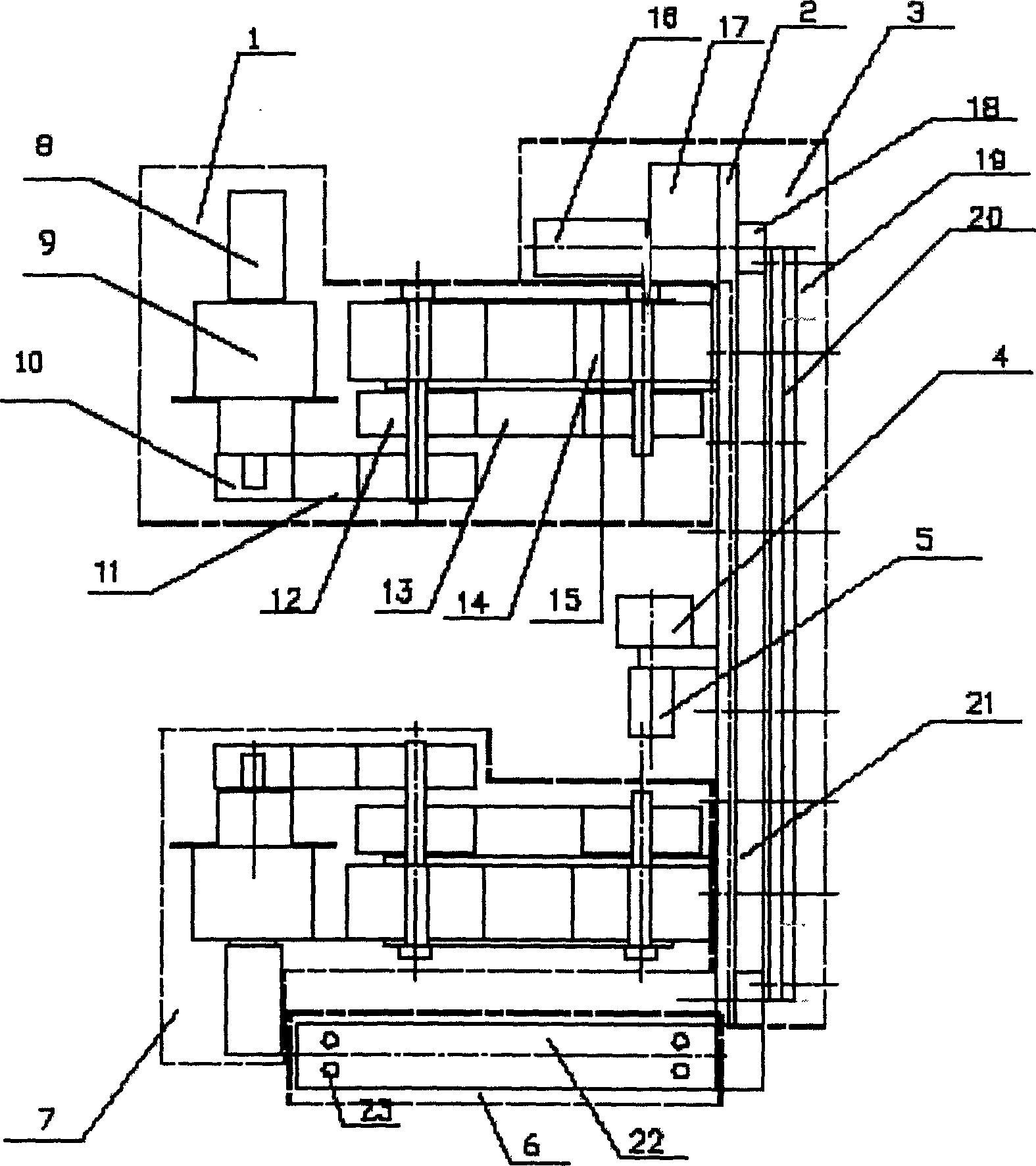
[0012] Such as figure 1 As shown, the present invention includes: a left wheel structure 1, a support frame 2, a detection structure 3, a roller 4, a code disc 5, a position correction structure 6, and a right wheel structure 7, and the connection mode is: the left wheel structure 1 and the right wheel structure 7 are completely Same, symmetrically fixed on both sides of the support frame 2, power is provided for the movement of the wall-climbing robot, the detection structure 3 is fixed on the front of the support frame 2, drives the movement of the slider, and is used to detect the weld of the cylinder wall, the roller 4 and The code disc 5 is fixed in the middle of the support frame 2, reflecting the distance that the robot advances. The position correction structure 6 is connected to the far right side of the support frame 2, which can adapt to the curvature of the wall surface and rotate at a certain angle around the support frame 2 for correction. The pose deviation of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More