

Setting method and setting apparatus for operation path for articulated robot
一种多关节、机器人的技术,应用在仪器、机械手、模拟器等方向,能够解决长时间周期等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
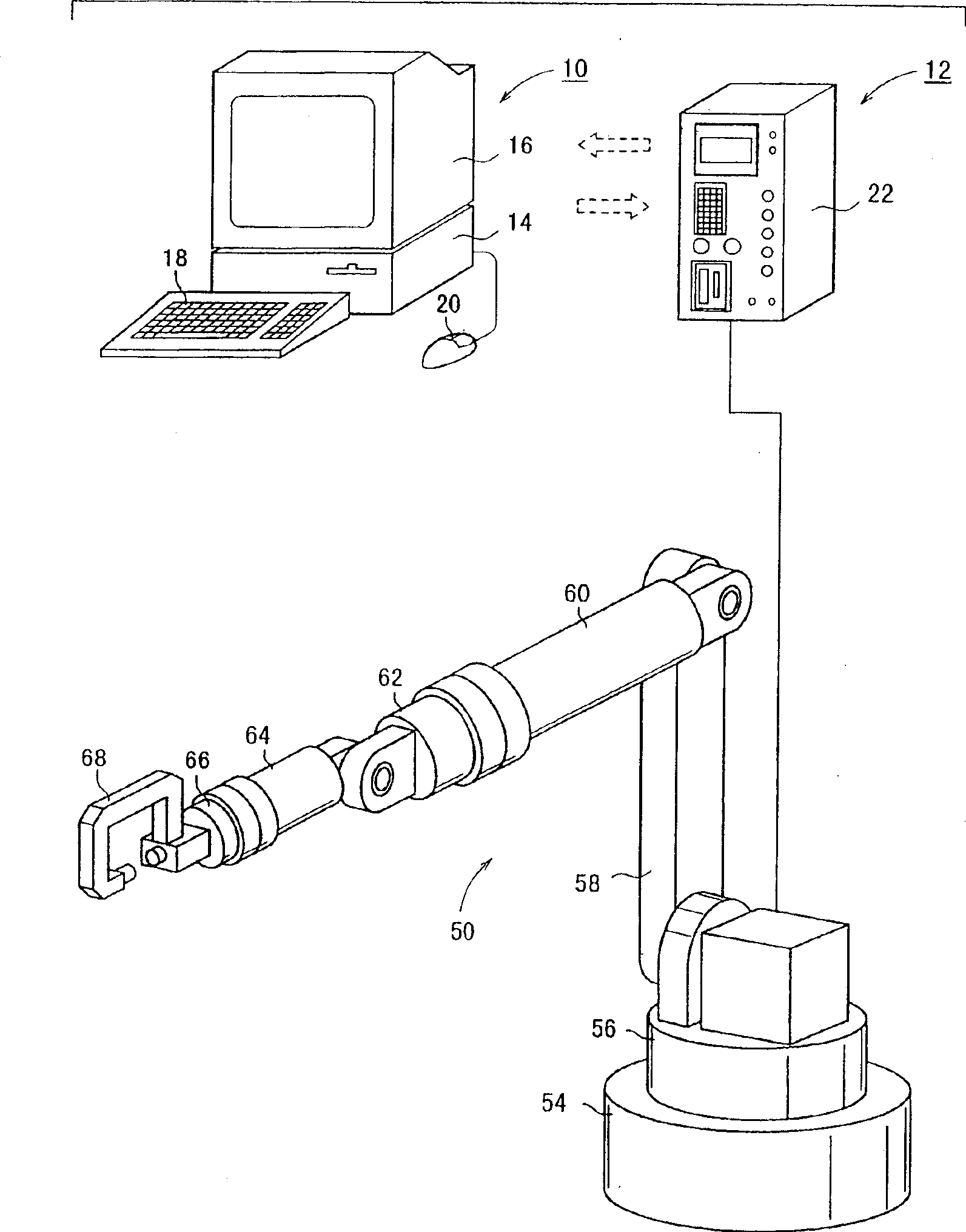
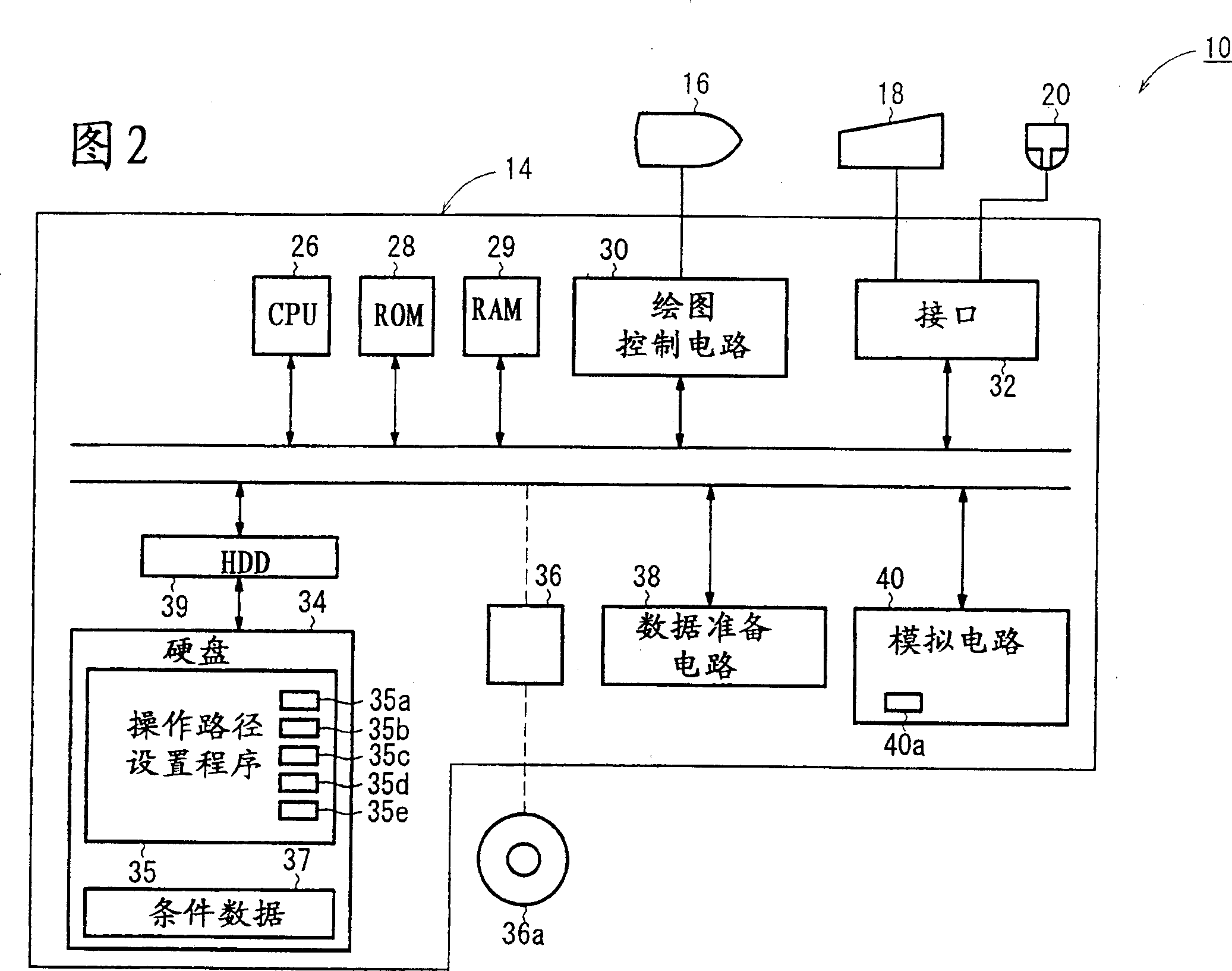
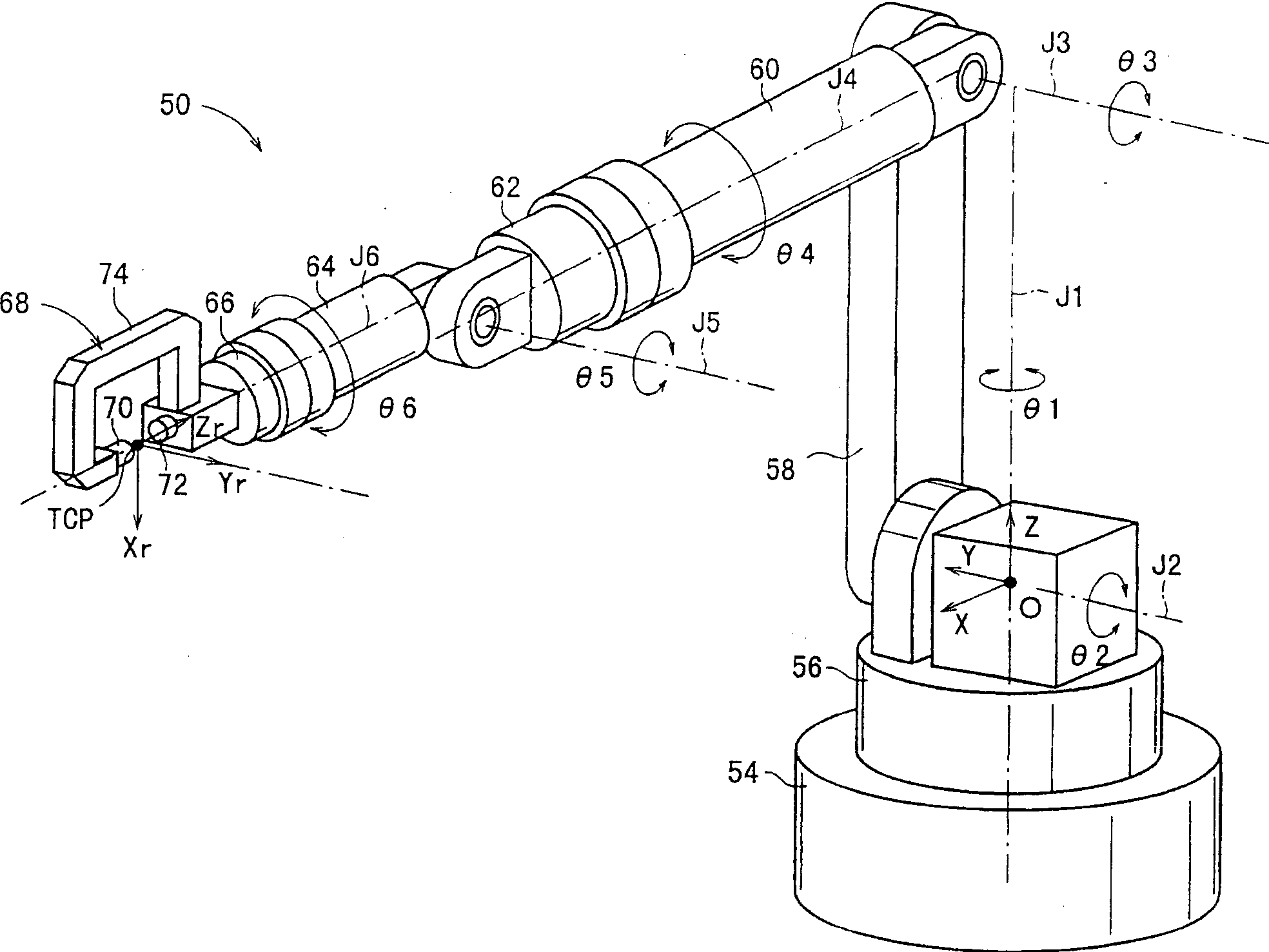
[0067] The following will refer to Figure 1-21 An illustrative embodiment of the setting method and setting apparatus for the operation path of the articulated robot of the present invention will be explained.
[0068] Basically, in the setting method and setting device for the operation path of the articulated robot according to this embodiment of the present invention, when extracting a workpiece in which there is a workpiece, the end effector provided on the front end of the articulated robot is moved from During the narrow operation where the operation point on the workpiece is retracted, the operation path is set when investigating the disturbed part in the internal space surrounded by the welding torch device. During a wide-area operation for moving between retracted positions, an operation path is set to move to an arrival point while avoiding obstacles by operating when combined with a template operation that moves a specified distance from a starting point in a speci...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More