

Method for autocontrolling excavation direction of underground excavator using virtual track
A technology of virtual trajectory and roadheader, which is applied in earth-moving drilling, mining equipment, tunnels, etc., can solve the problems of slow deviation correction process, difficulty in integrating manual control experience, and inability to achieve linear asymptotic performance of deviation correction. The effect of avoiding engineering quality problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
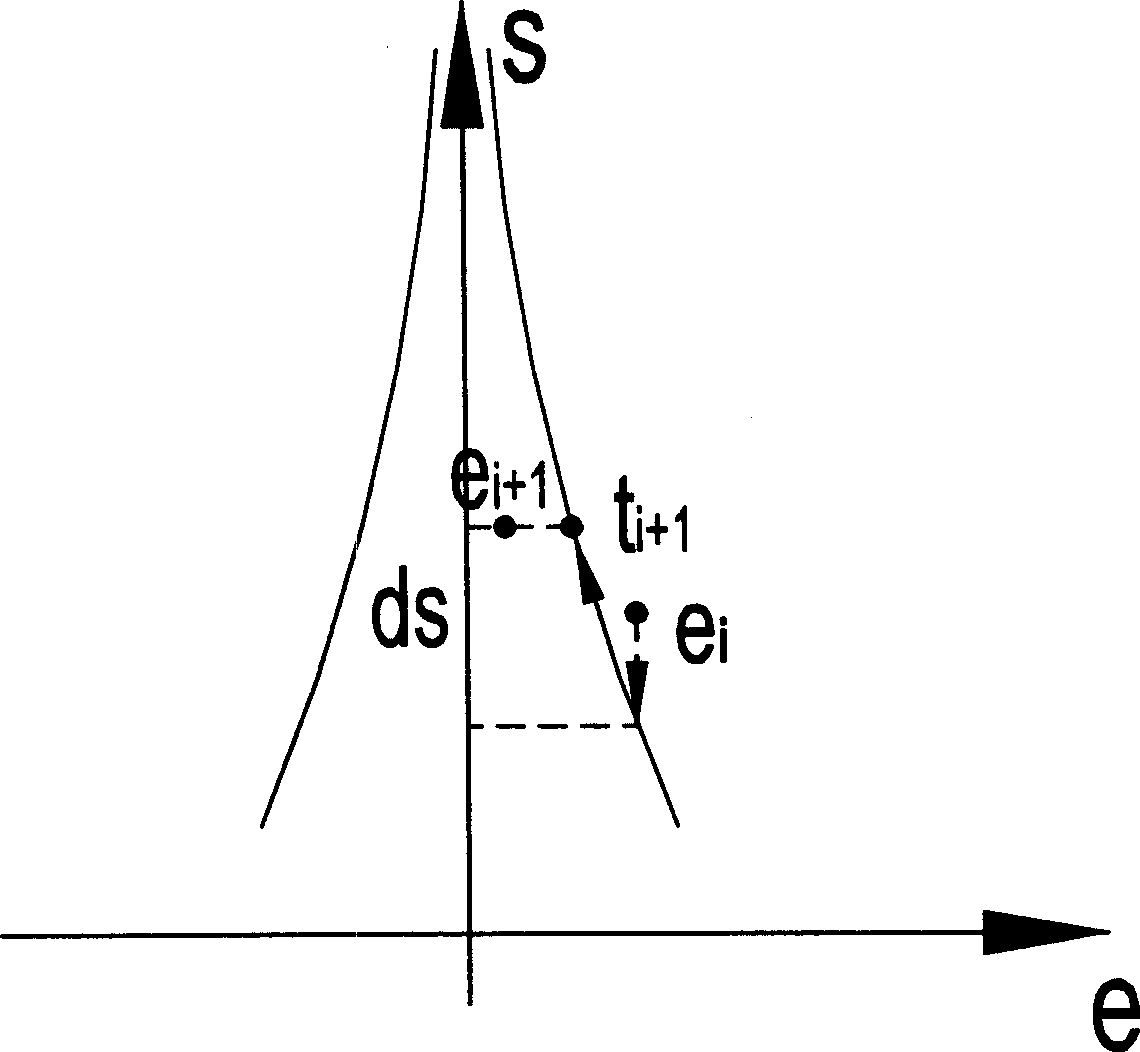
[0065] 1. Calculate the error e of the current control cycle from the parameters of the position and attitude of the roadheader detected by the detection system and the design axis i =23, the error e of the previous control cycle i-1 =25, the error of the first two control cycles: e i-2 = 28.5.
[0066] 2. Set the working condition constant k=1, the axis tolerance value a=50 of the project quality standard, and the control step size dl=20, and the set value t of the control target of the current control cycle can be obtained i+1 = 19.4.
[0067] 3. Calculated: directional error E=-1.6, directional error change: EC=1.5; and E and EC are subjected to fuzzy quantization processing, and the decimals are rounded to obtain e=-2 and ec=2.
[0068] 4. Take e and ec as input for fuzzy control processing, and query the fuzzy membership table:
[0069]
[0070] Finally, the deviation correction signal is output, that is, the deviation correction vector increment u=-2.
[0071] 5. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More