

Method for determining the position of an object in a space
An object and space technology, which is applied in the field of determining the position of objects in space, can solve problems such as time-consuming, and achieve the effect of increasing analysis costs and improving costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
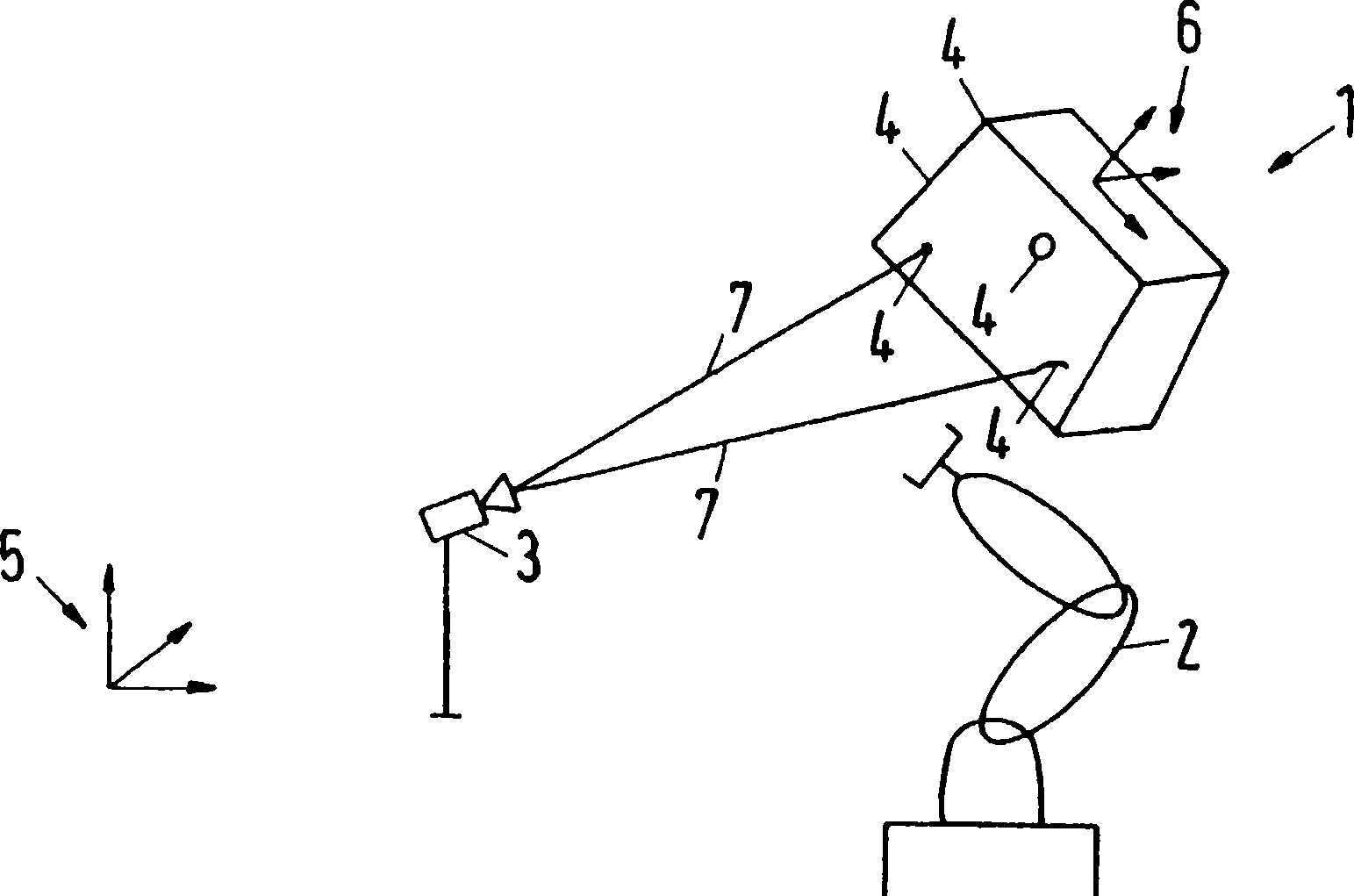
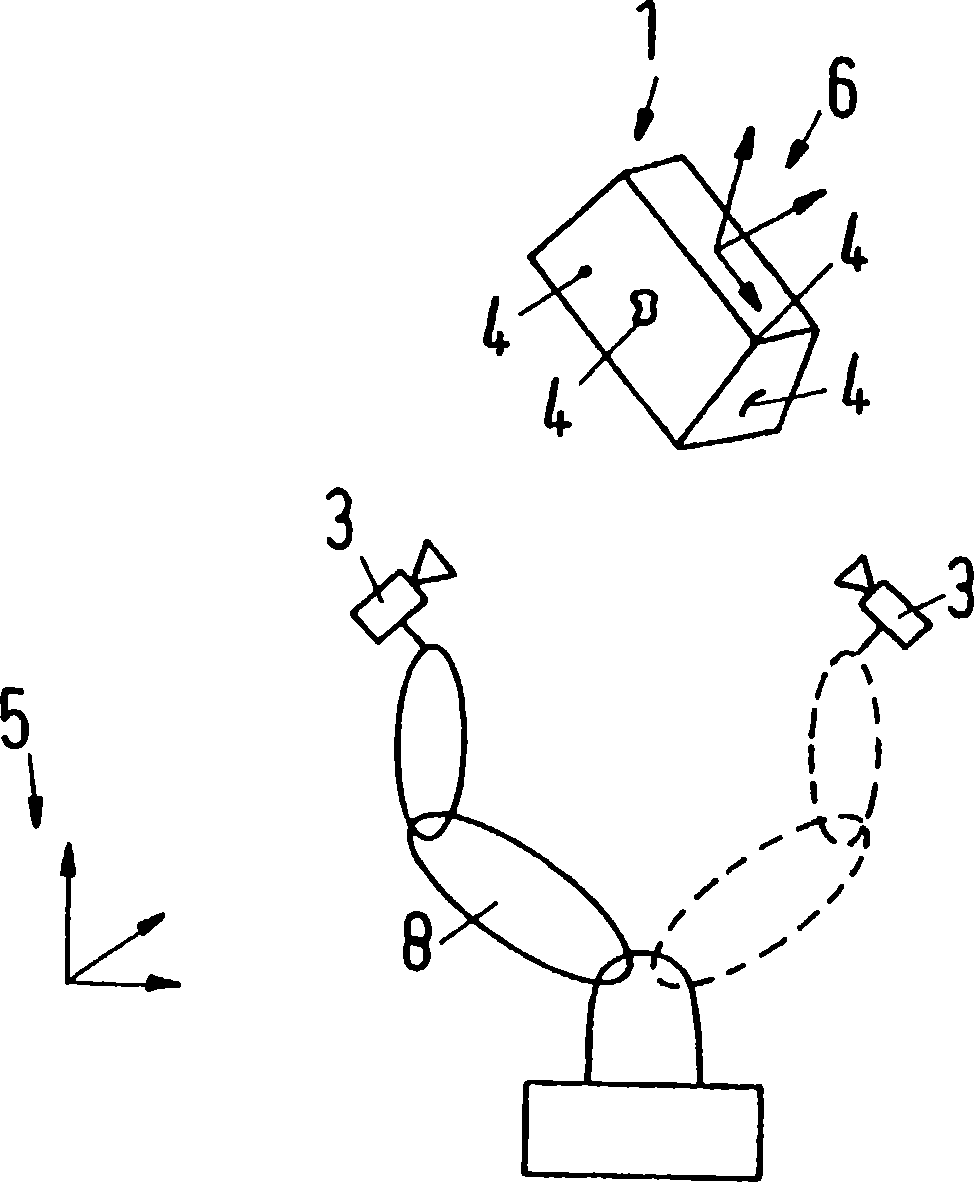
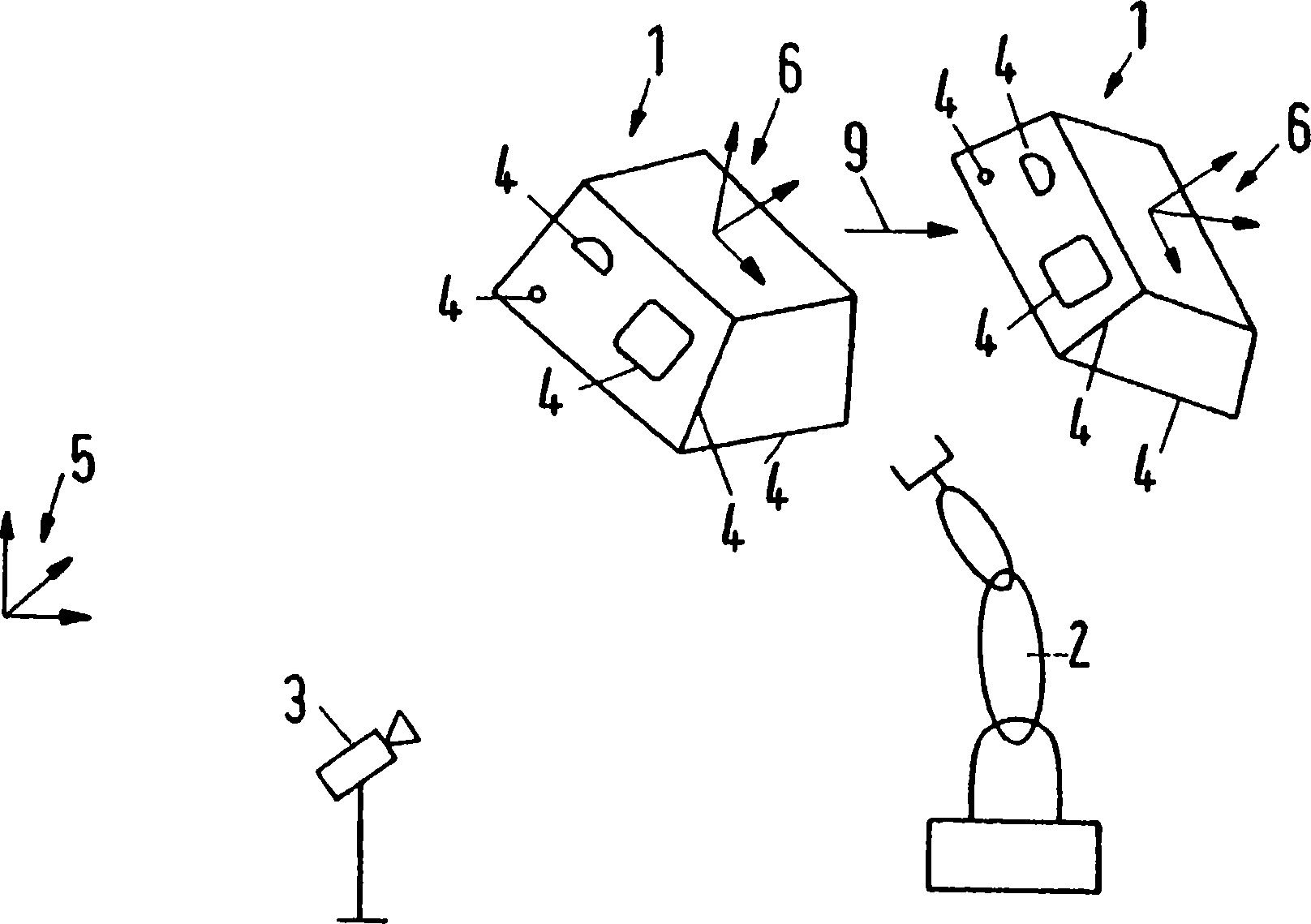
[0025] exist figure 1 A system according to the invention is shown in , with which the method according to the invention for determining the position of an object 1 in space can be carried out. (in the figure) shows an object 1 whose position in space is to be determined. It is often necessary to determine the position of objects in space during production and assembly processes in automatic production lines in which objects 1 are positioned in space, for example by conveyor belts or the like. The position of object 1 is therefore unknown. The purpose of determining the position is usually to be able to carry out a mounting, gripping or machining process on the processing object 1 whose position is unknown. Mounting must generally always take place at the same reference point on the object 1 . In order to achieve this, if the position of the object 1 is unknown, it must be measured and the manipulator 2 , which is to mount the component to be assembled on the object 1 , fol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More