

Modular mobile robot
a mobile robot and module technology, applied in mechanical machines/dredgers, manufacturing tools, instruments, etc., can solve the problems of inoperable, requiring more power, and damaging the track or the drive mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
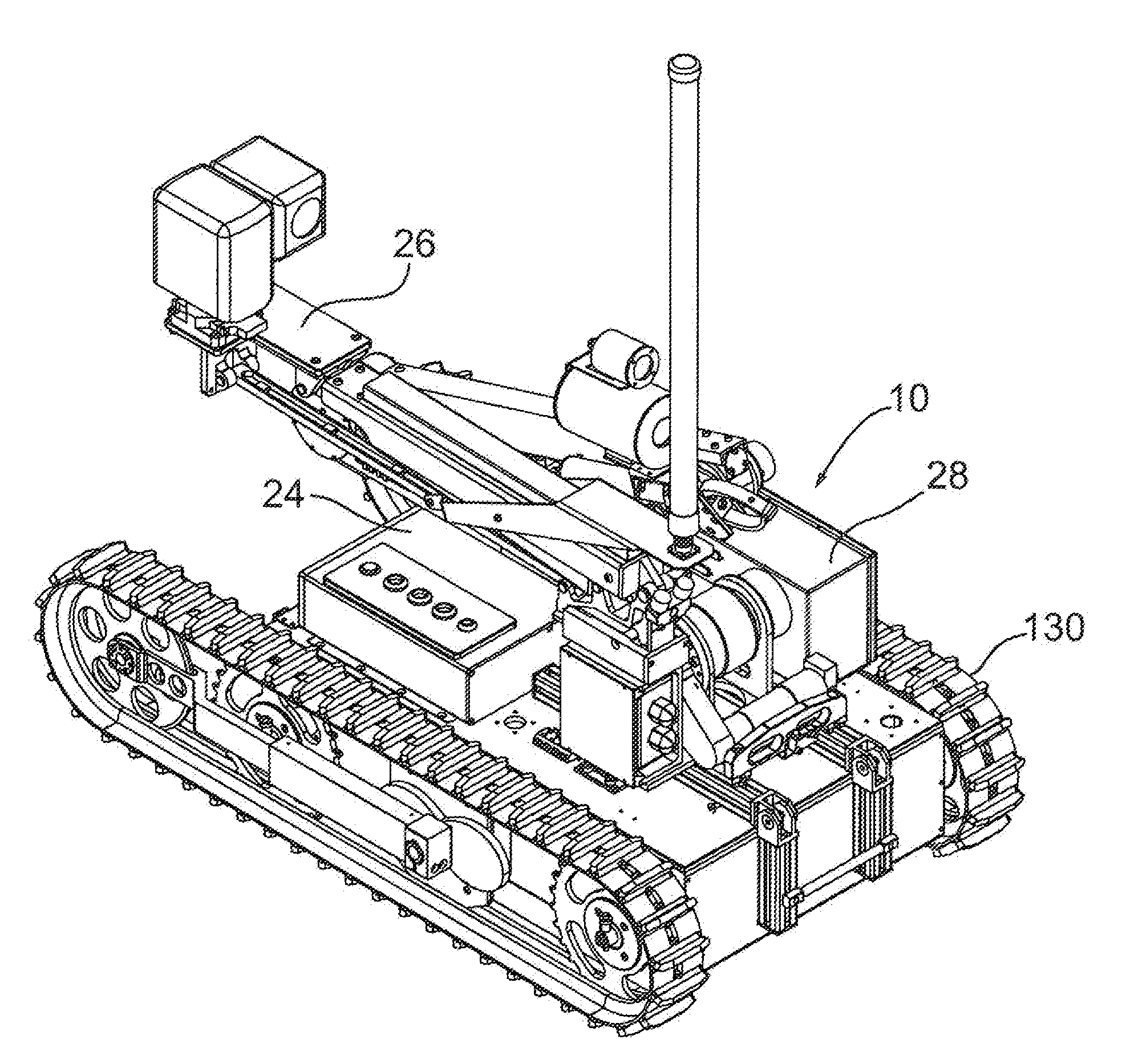
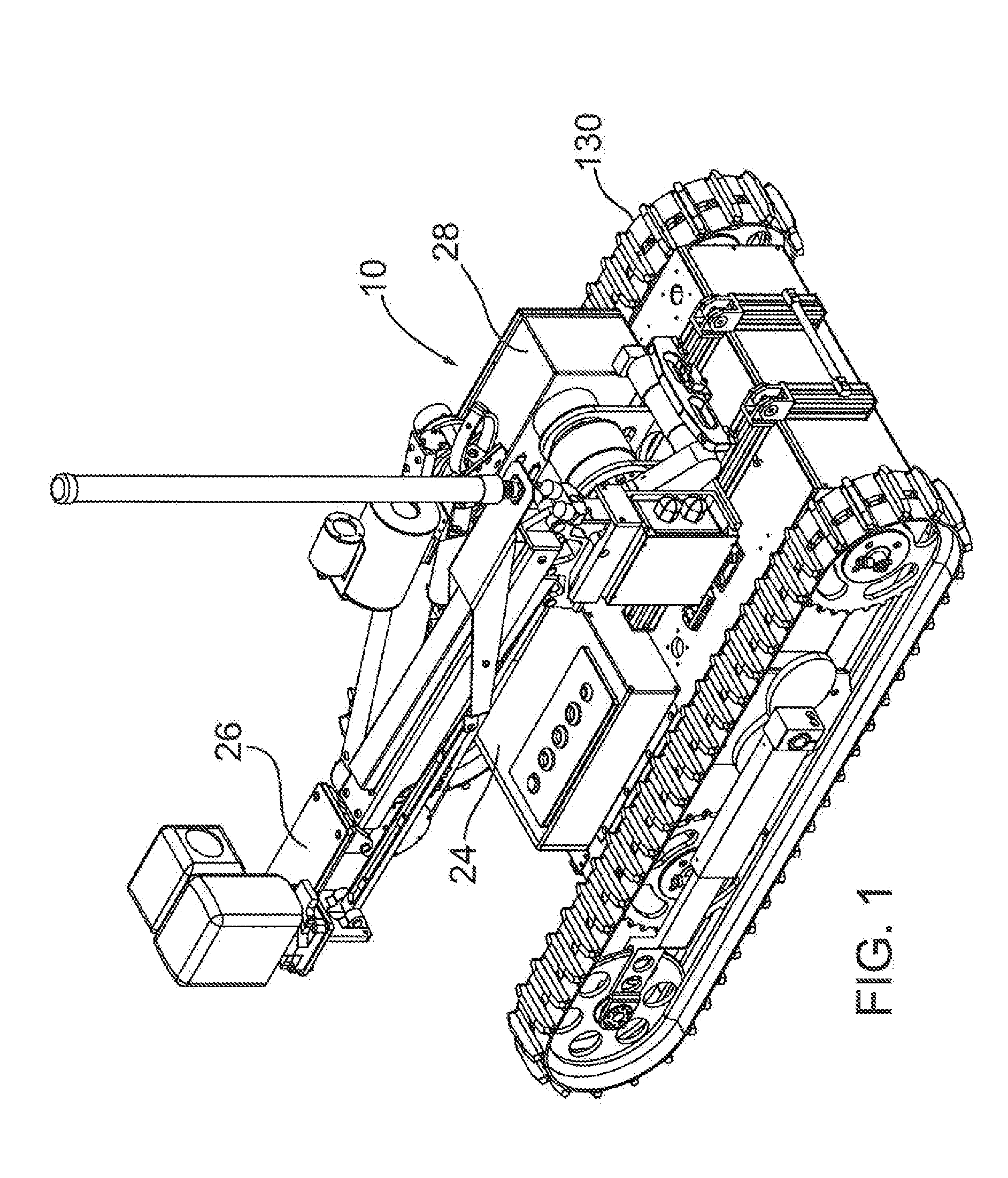
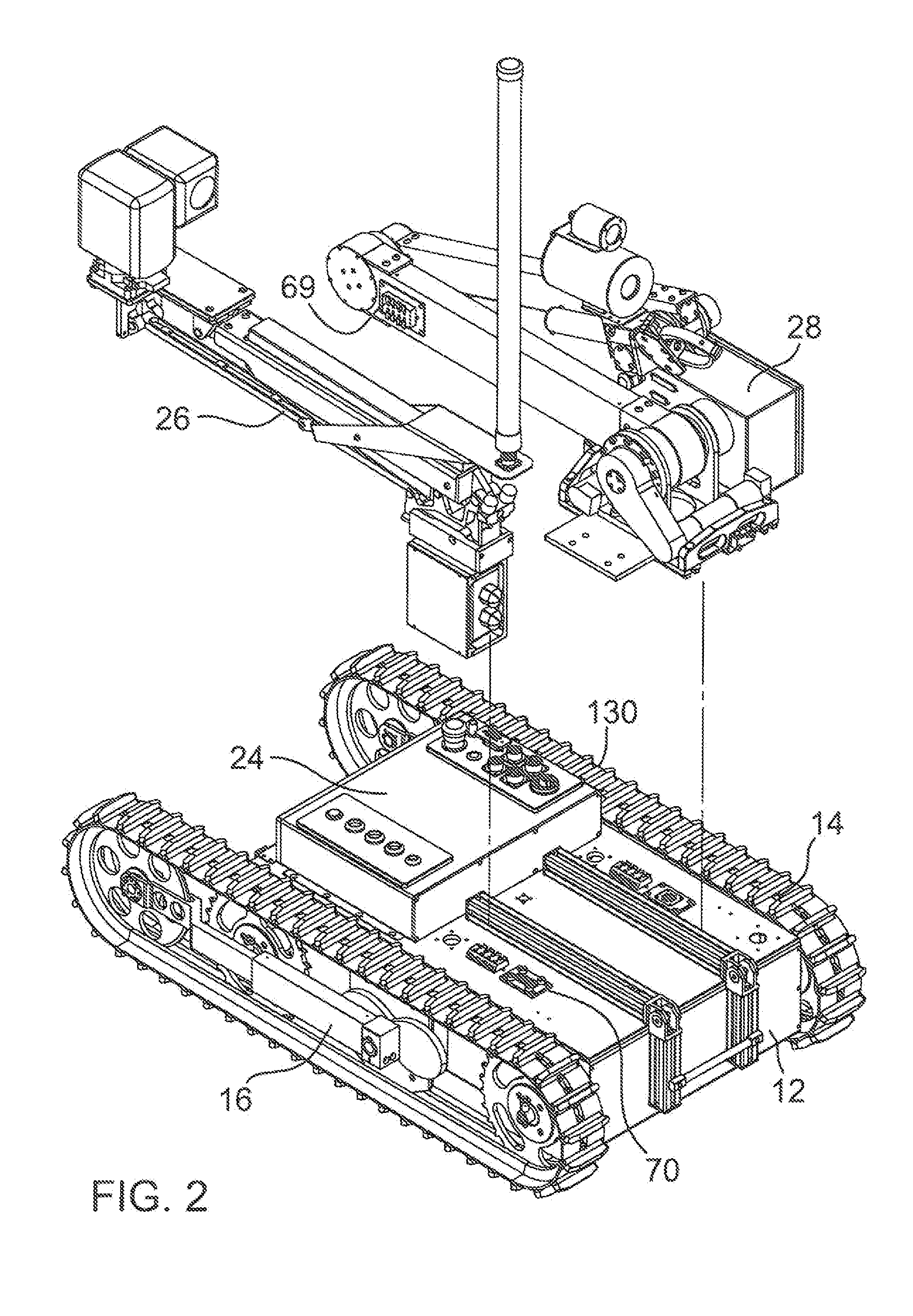
[0087]The systems described herein are directed, in general, to modular mobile robots, to interchangeable features for use therein, to a tooling arm for use therewith, to an endless track for use therewith and to a flexible tail. Although embodiments of the mobile robot are disclosed herein, the disclosed embodiments are merely exemplary. Furthermore, the Figures are not drawn to scale and some features may be exaggerated or minimized to show details of particular features while related elements may have been eliminated to prevent obscuring novel aspects. Therefore, specific structural and functional details disclosed herein are not to be interpreted as limiting but merely as a basis for the claims and as a representative basis for enabling someone skilled in the art to a mobile robot.
[0088]Referring to FIGS. 1 and 2 an embodiment of the modular mobile robot is shown generally 10. Mobile robot 10 has a number of features that are modular. As well, some of the modules or components a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More