

Arrangement and method for visual detection in a milking system
a technology of visual detection and milking system, which is applied in the direction of milking devices, manipulators, catheters, etc., can solve the problems of not working satisfactorily, sensor costs may not be negligible, and sensor work may not be reliably or even damaged, so as to achieve low cost or flexible implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
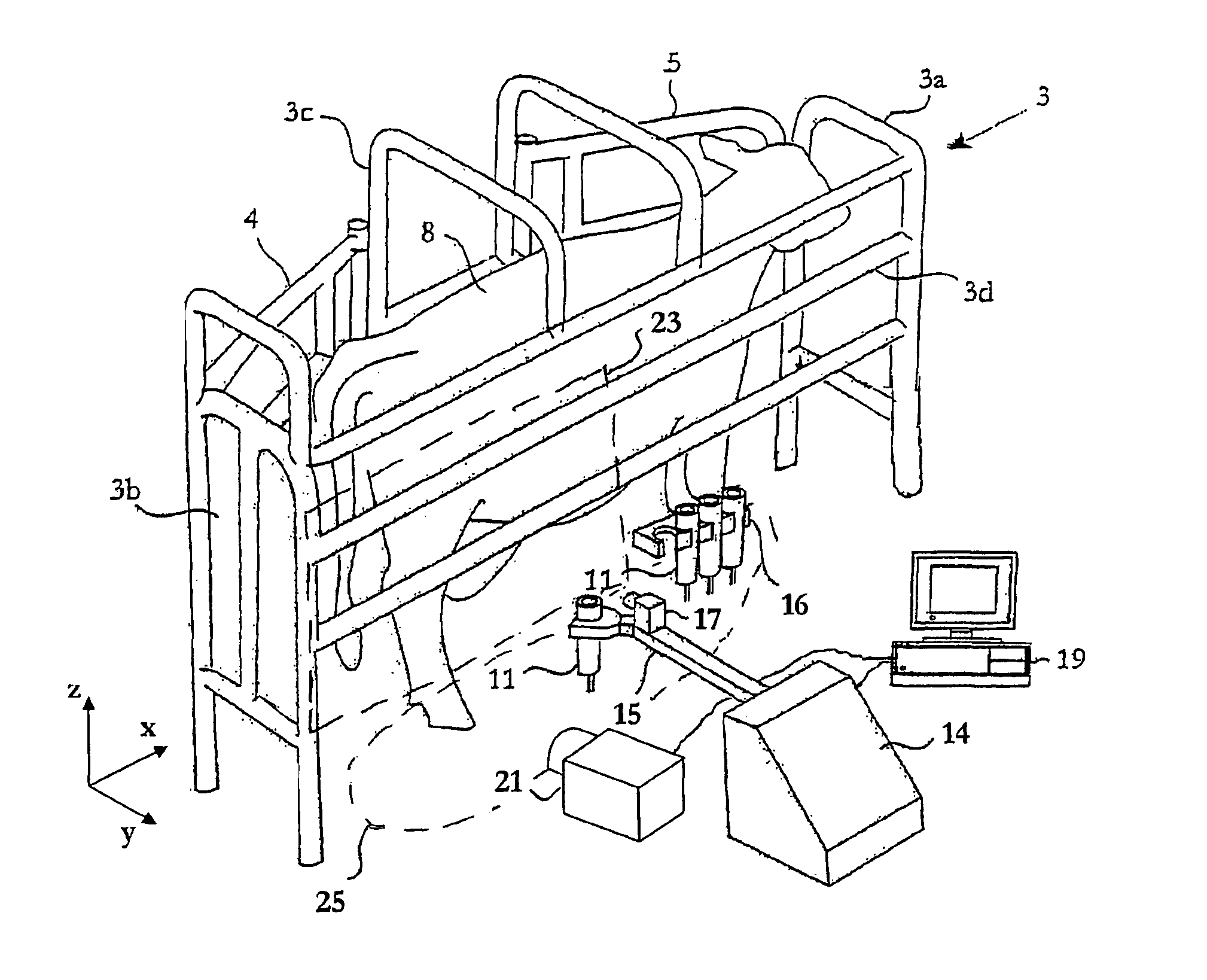
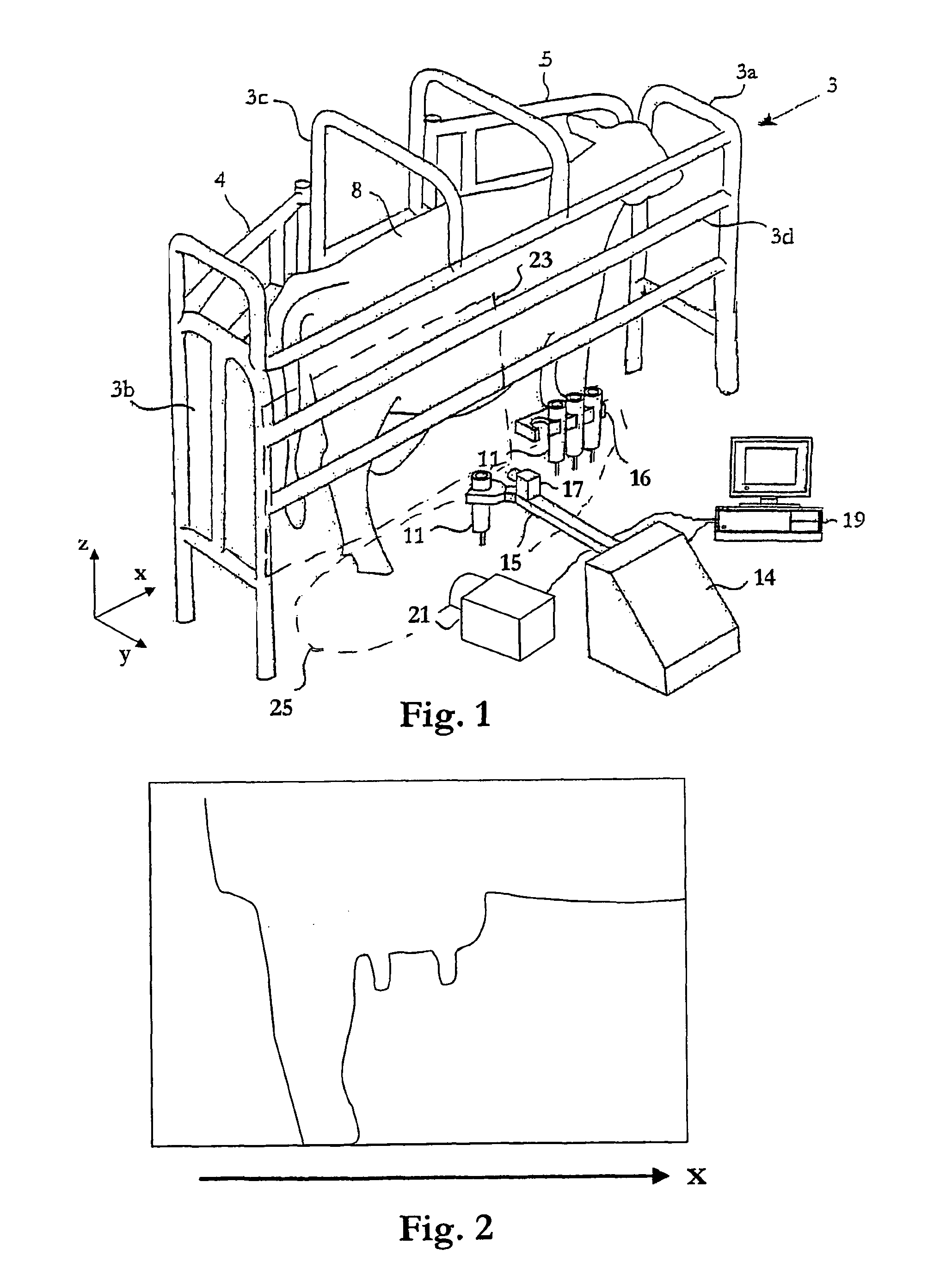
[0031]In FIG. 1 is shown a milking system or station 3 arranged for voluntary milking of freely walking animals such as cows, i.e. the cows enter the milking system 3 in order to be milked on a voluntary basis. The milking system 3 comprises a milking box having an inlet gate 4 and an outlet gate 5, which are both capable of being opened automatically. The front end of the milking box of the milking system 3 is denoted by 3a, the back end is denoted by 3b, the left side is denoted by 3c and the right side is denoted by 3d.
[0032]The milking system 3 comprises further an automatic milking machine (not explicitly illustrated) including teat cups 11 connected to an end unit by means of milk lines (only the portions attached to the teat cups 11 are shown in FIG. 1). The milking system further comprises a milking robot or automatic handling device 14 including a processing and control device 19 and a robot arm 15 provided with a gripper. The milking robot 14 is arranged to automatically ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More