

Multi-coordinate serioparallel robot with redundant freedom
A technology with degrees of freedom and multi-coordinates, applied in the field of robotics, can solve problems such as the long adjustment stroke of the adjustment device, and achieve the effect of large working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
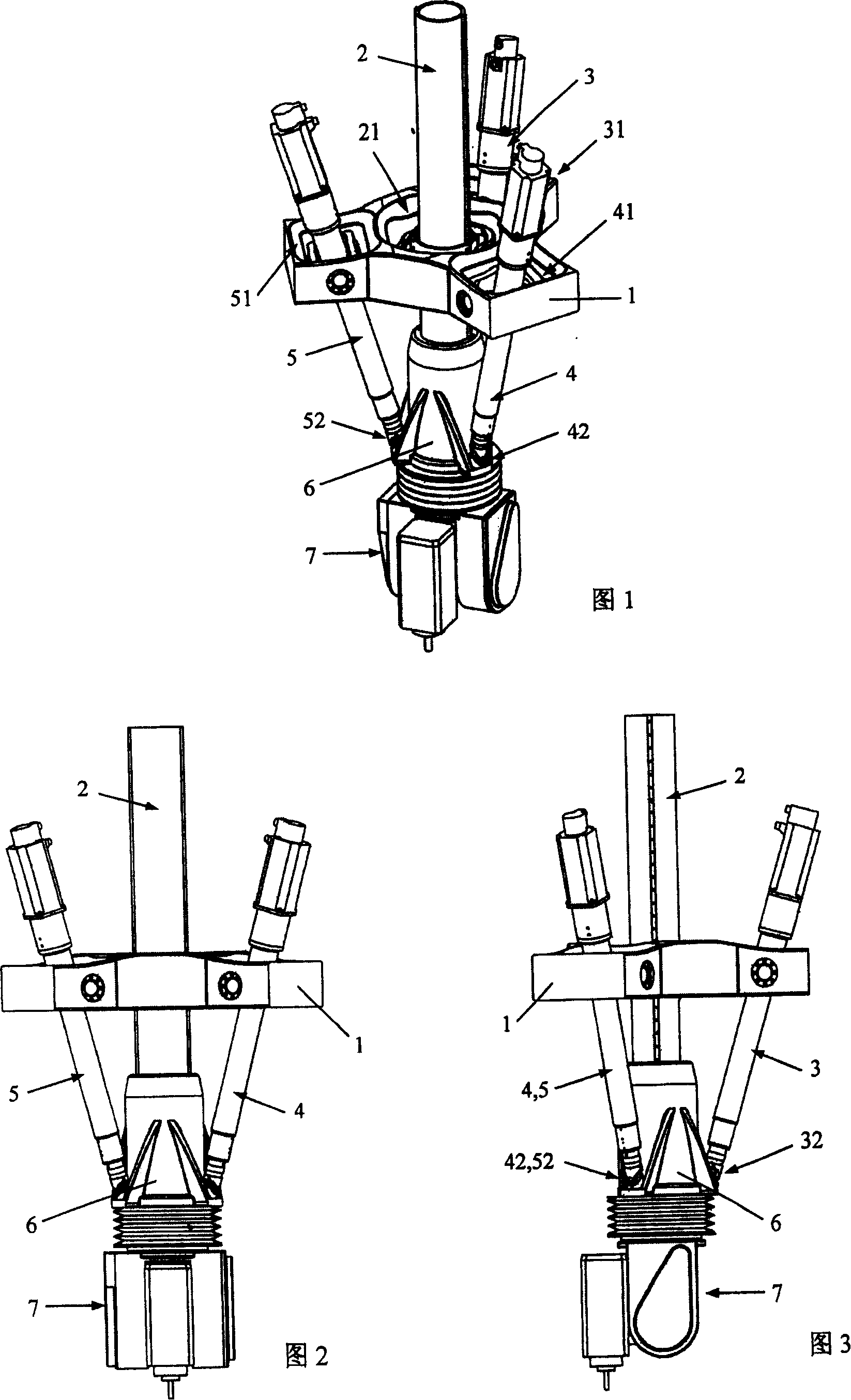
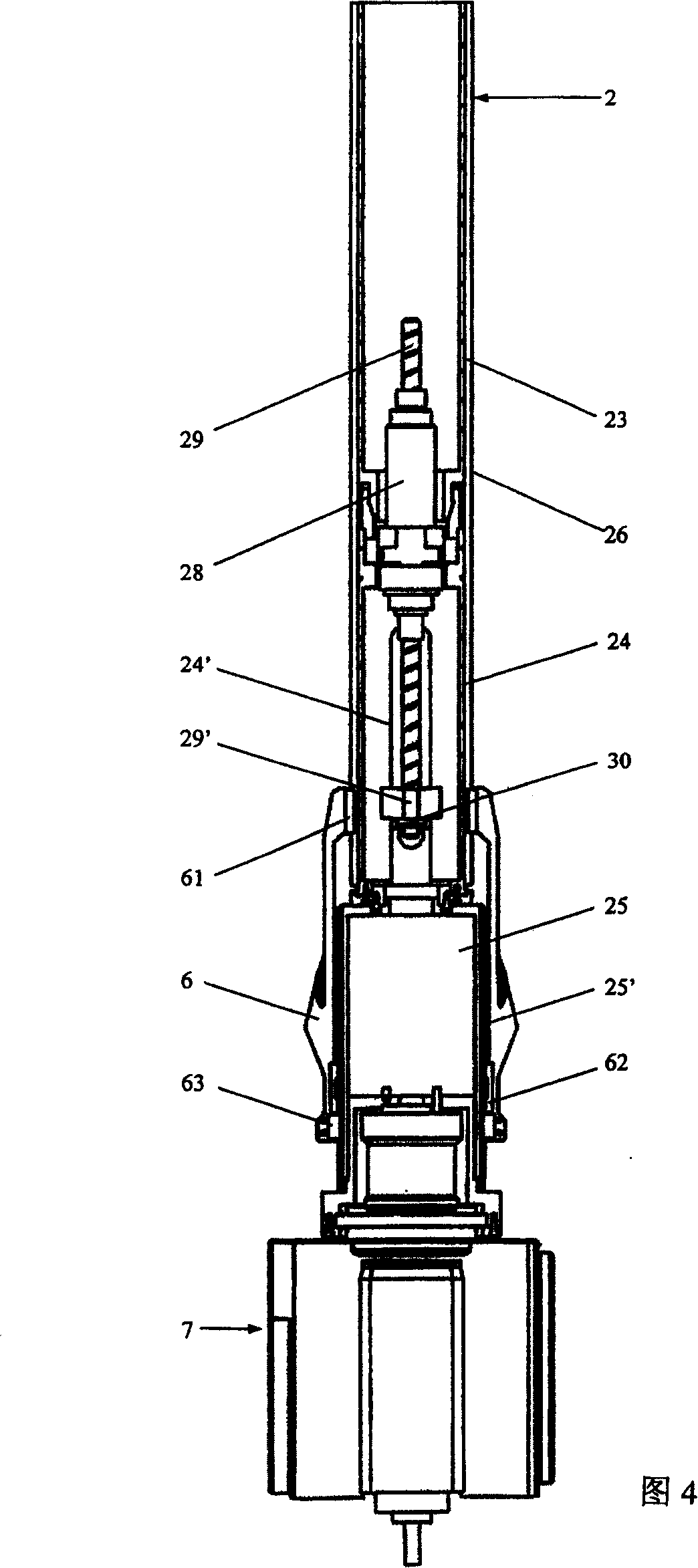
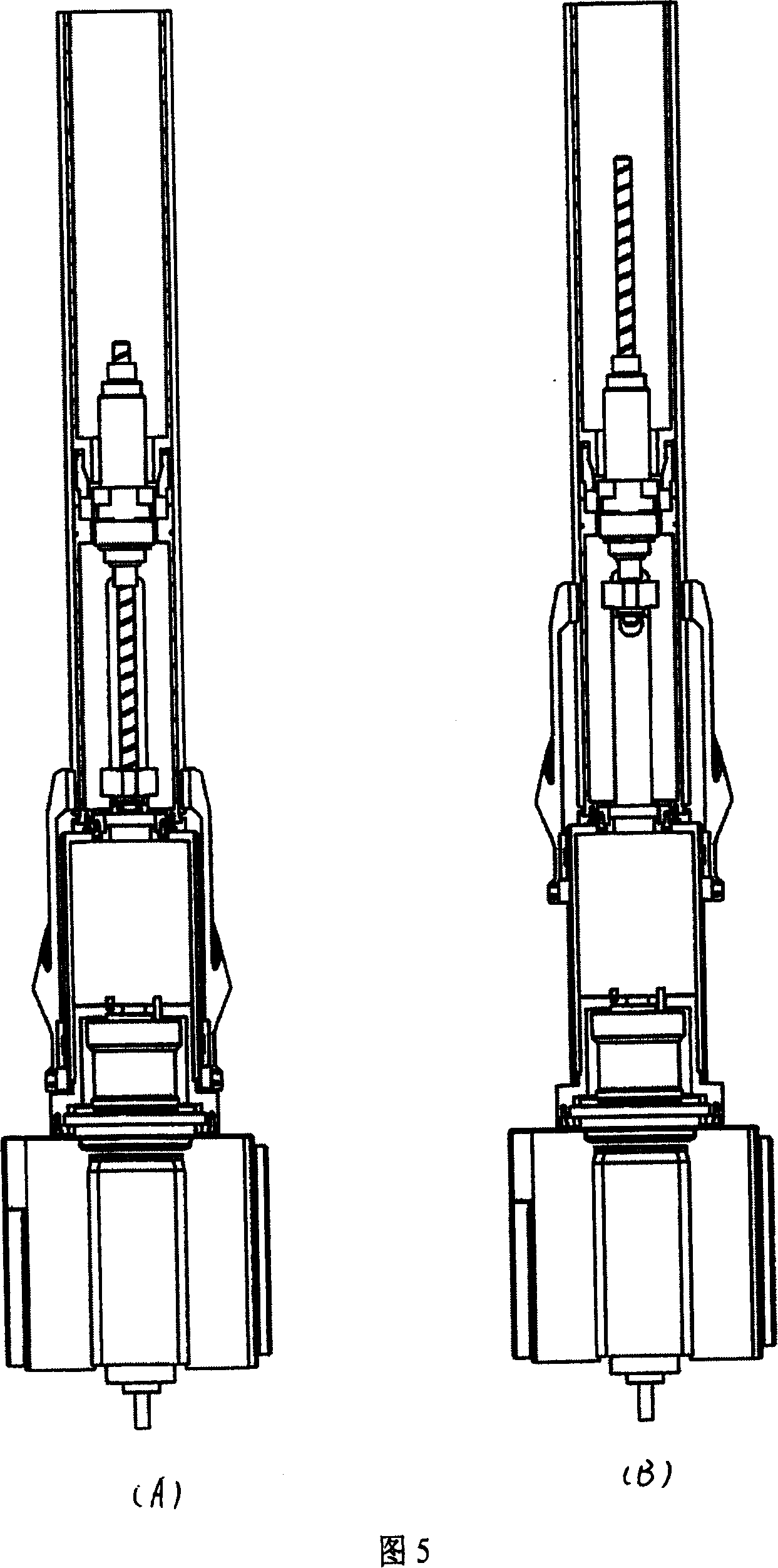
[0017] As shown in Figures 1 to 3, the multi-coordinate hybrid robot with redundant degrees of freedom of the present invention includes a fixed frame 1, a first length adjustment device 2, a second length adjustment device 3, a third length adjustment device 4, The fourth length adjusting device 5, the moving platform 6 and the positioning head 7. The fixed frame 1 is provided with first, second, third and fourth hinges 21, 31, 41, 51 with two rotational degrees of freedom. In this embodiment, the first hinge 21 is located in the middle of the fixed frame 1, and the second 2. The third and fourth hinges 31 , 41 , 51 are evenly distributed around the first hinge 21 as the center circle. The upper part of the first length adjustment device 2 is arranged on the fixed frame 1 through the first hinge 21 and the sliding pair formed with the first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More