

Lnear motor possessing dual winding element of mover
A technology of winding unit and linear motor, applied in the direction of electric components, electrical components, electromechanical devices, etc., can solve the problems of long signal response time, low motion rigidity, poor anti-interference ability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
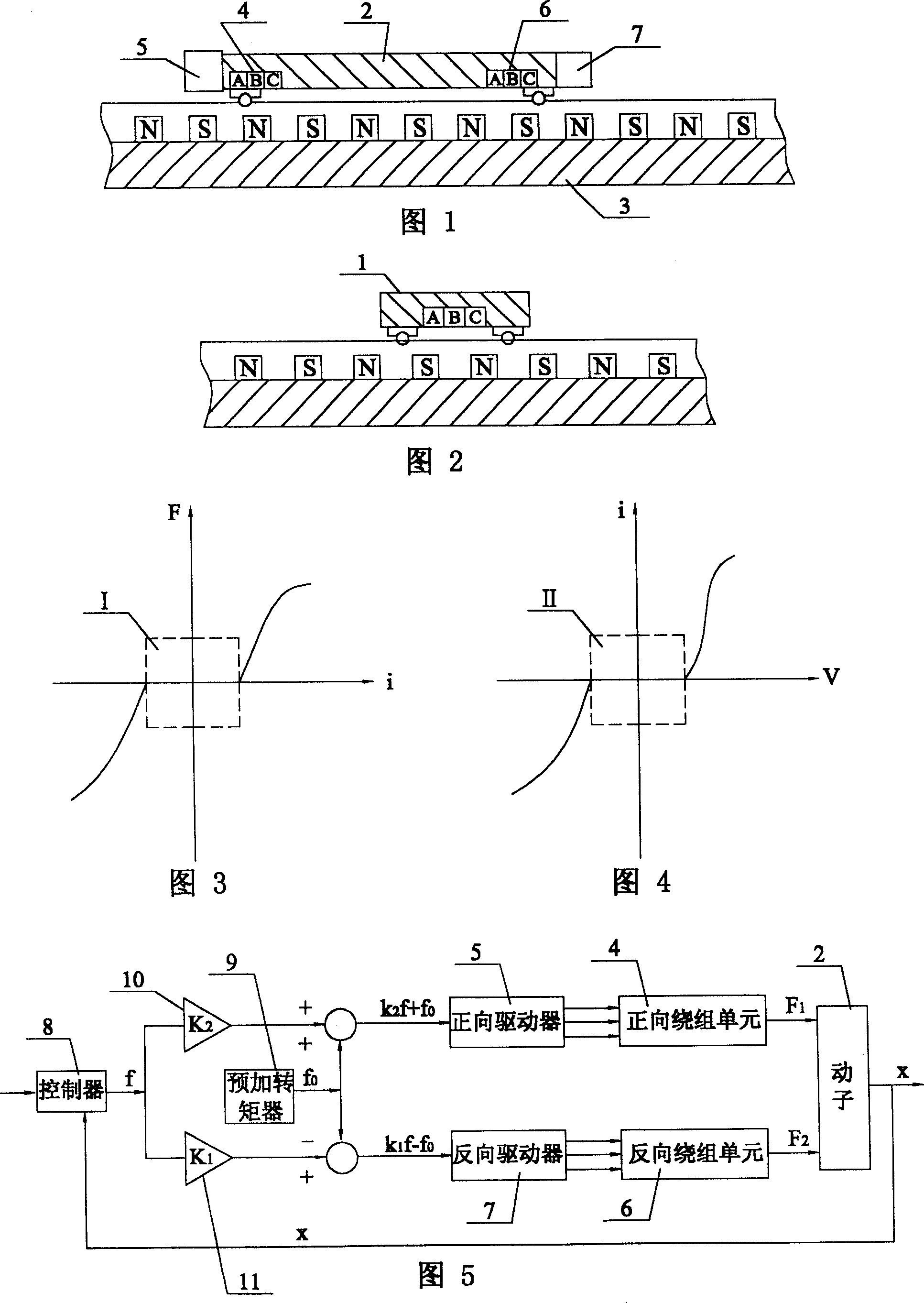
[0005] Specific Embodiment 1: The present embodiment will be specifically described below with reference to FIG. 1 . It consists of a mover 2, a stator 3, a forward winding unit 4, a forward driver 5, a reverse winding unit 6 and a reverse driver 7, and the forward winding unit 4 and the reverse winding unit 6 are longitudinally arranged on the side of the mover 2. At both ends, the forward driver 5 controls the direction and magnitude of the current in the forward winding unit 4 , and the reverse driver 7 controls the direction and magnitude of the current in the reverse winding unit 6 .
specific Embodiment approach 2
[0006] Specific Embodiment 2: The present embodiment will be specifically described below with reference to FIG. 5 . The difference between this embodiment and Embodiment 1 is that it also includes a controller 8, a first proportional gainer 10, a second proportional gainer 11 and a pre-torque 9, and the controller 8 receives the feedback from the mover 2 Displacement signal x and send out torque signal f, one way of torque signal f and the second proportional gain K of the first proportional gainer 10 2 After being multiplied with the signal f sent by the pre-torque device 9 0 superimposed and put the generated second signal K 2 f+f 0 Delivered to the forward driver 5, the forward driver 5 controls the forward winding unit 4, and the other path of the torque signal f is connected with the first proportional gain K of the second proportional gainer 11 1 Subtract the signal f sent by the pre-add torque device 9 after multiplication 0 and put the generated first signal K 2 ...
specific Embodiment approach 3
[0007] Embodiment 3: The difference between this embodiment and Embodiment 2 is that the first proportional gain K 1 and the second proportional gain K 2 The value of is also one-half.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More