

Arm structure of robot
An automaton and structure technology, which is applied to the arm structure of the conveying robot and the field of the conveying robot, can solve the problems such as the reduction of the area and the difficulty of moving the conveyed object 21 to the desired position, and achieves the effect of improving the versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0114] Below, refer to Figure 1 to Figure 30 , a transfer robot as an embodiment of the present invention will be described.
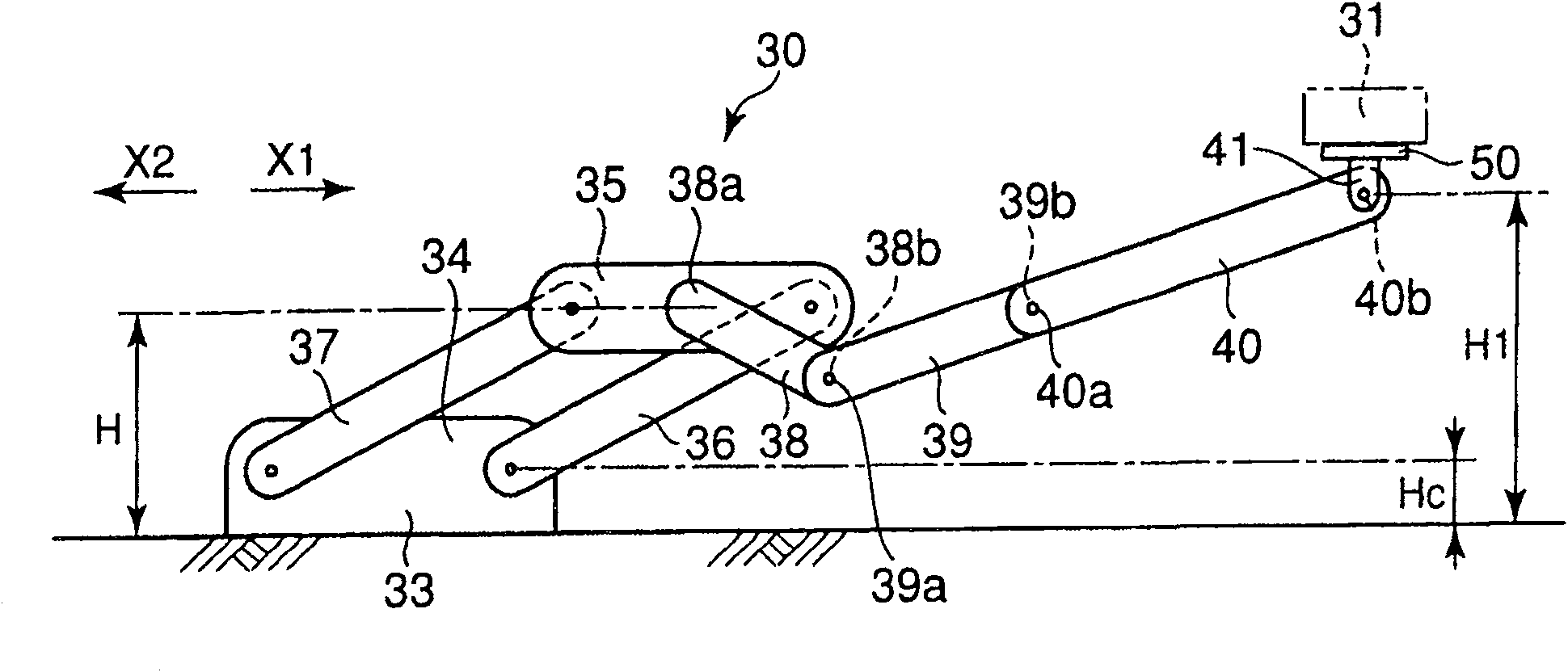
[0115] figure 1 It is a front view which simplifies and shows the conveyance robot 30 of this embodiment. The conveyance robot 30 is provided in plurality, and moves the conveyed object 31 along a predetermined conveyance path. The conveyance robot 30 receives the conveyed object 31 from the conveyance robot 30 upstream X2 in the conveyance direction, and delivers the received conveyed object 31 to the conveyance robot 30 downstream X1 in the conveyance direction. As a result, the objects to be conveyed 31 are sequentially conveyed along the conveyance path. For example, the object to be conveyed 31 is a heavy item such as a car body. In the present embodiment, the object to be conveyed 31 is disposed at a processing position while being conveyed by the conveyance robot 30 , and is processed by the processing robot.
[0116] The transfer robot 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More