

Single-vision measuring method of space three-dimensional attitude of variable-focus video camera
A technology of three-dimensional pose and measurement method, which is applied in the field of automation, and can solve the problems of decreased extraction accuracy, susceptibility to light and noise, and low measurement efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The overall process of the single-view measurement of the 3D pose and pose of the variable-focus camera is shown in Figure 5. In order to better understand the technical solutions of the present invention, a further detailed description will be made below in conjunction with the accompanying drawings and embodiments.
[0063] A single-view measurement method of a zoom camera space three-dimensional pose of the present invention comprises the following steps:
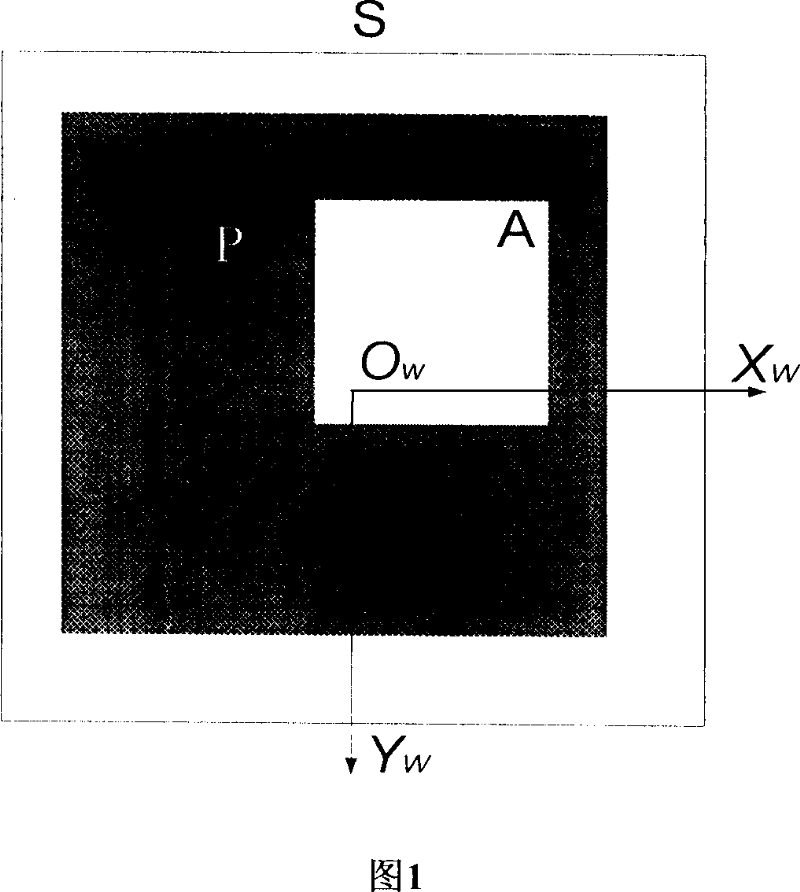
[0064] 1. Set the planar cooperation target: set a group of 3 square patterns with unknown parameters as the planar cooperation target, as shown in Figure 1. The characteristic pattern of the planar cooperation target needs to meet the following requirements: (1) Compared with its surrounding environment, the characteristic pattern should be easy to recognize, and the composition should be simple so that the visual system can quickly process the image; (2) The pattern contains enough Information, such as points, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More