

Bionic locust jumping robot
A technology of robots and locusts, applied in the field of jumping robots, to achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention is described in more detail below in conjunction with accompanying drawing example:
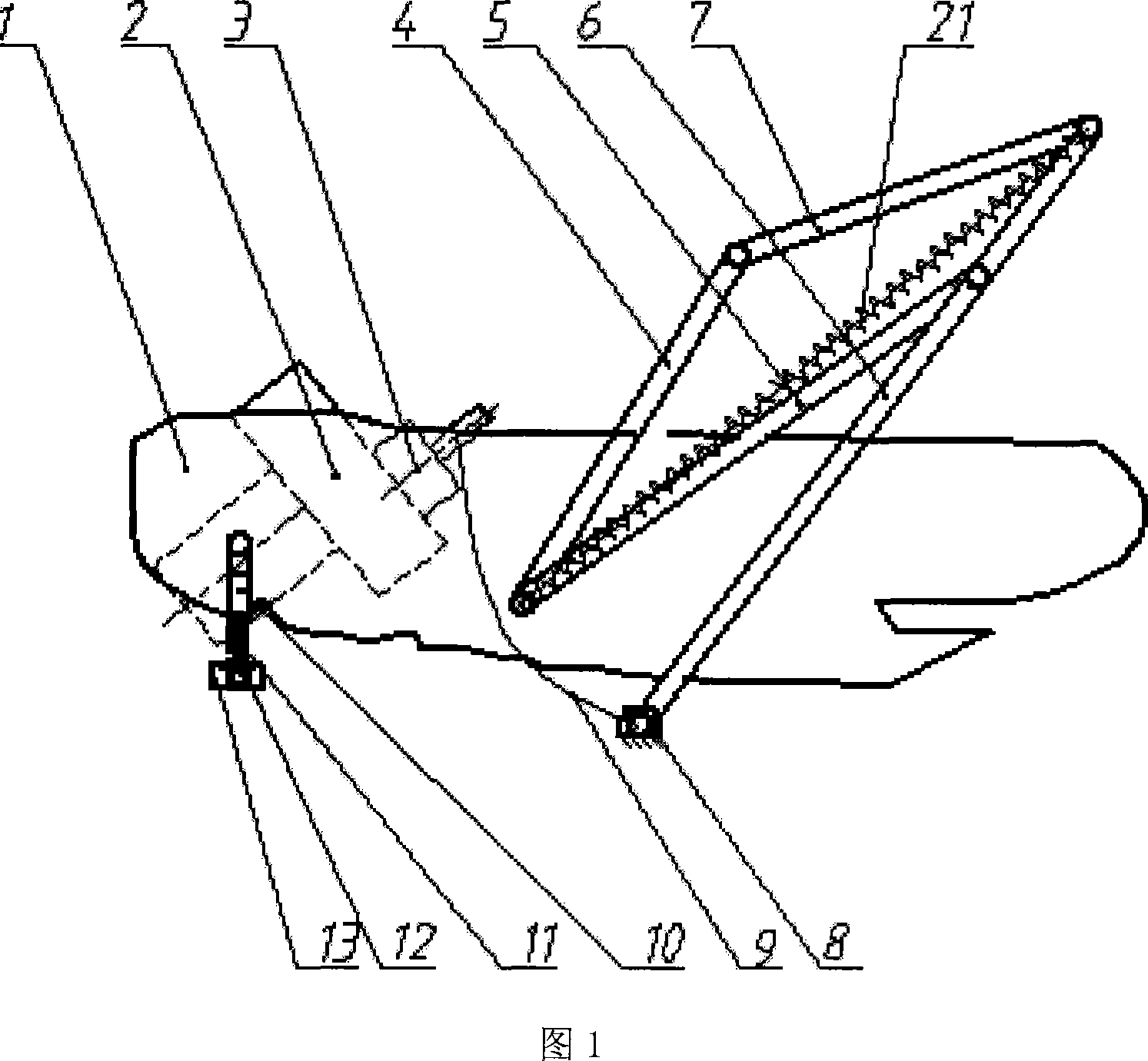
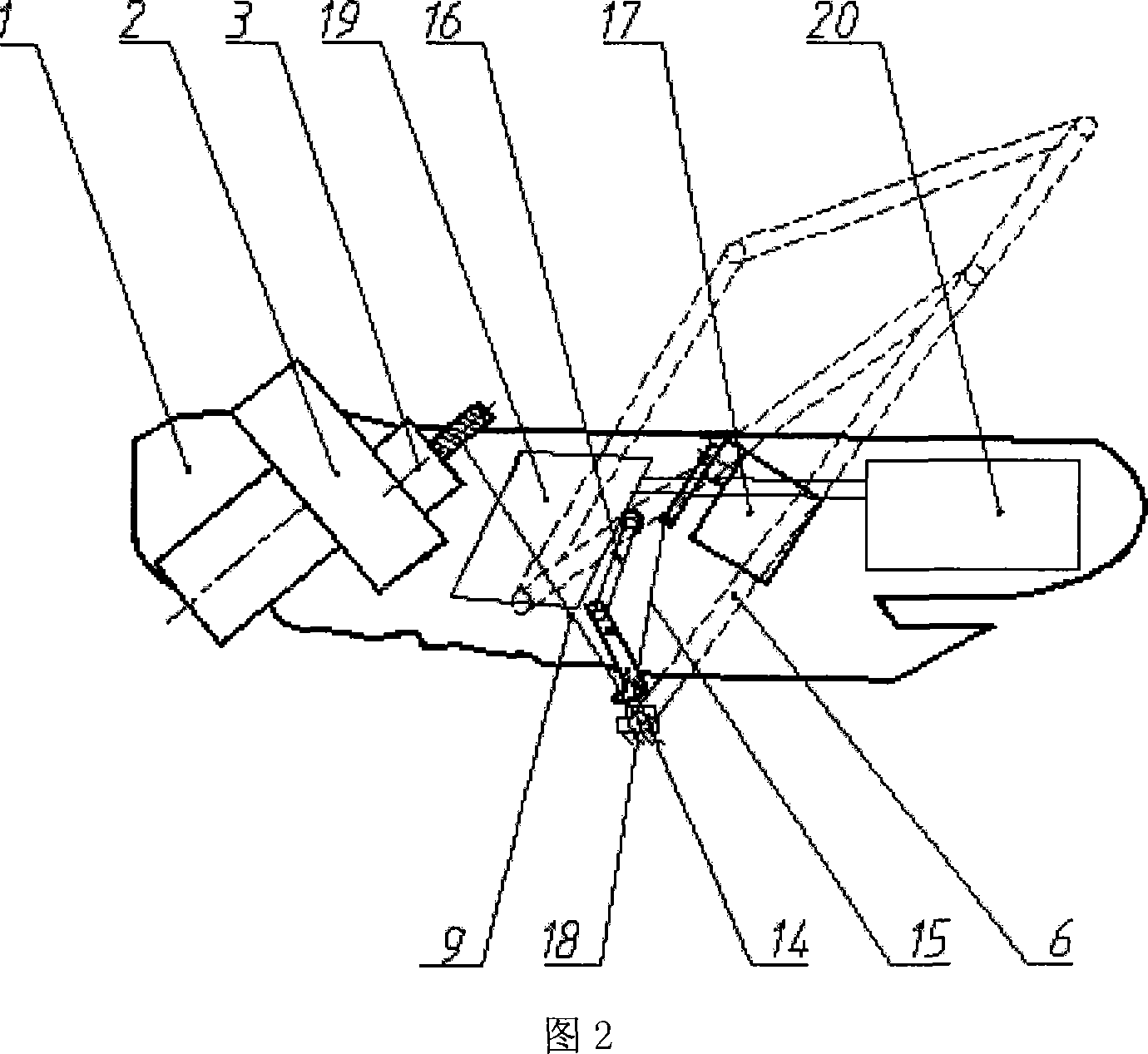
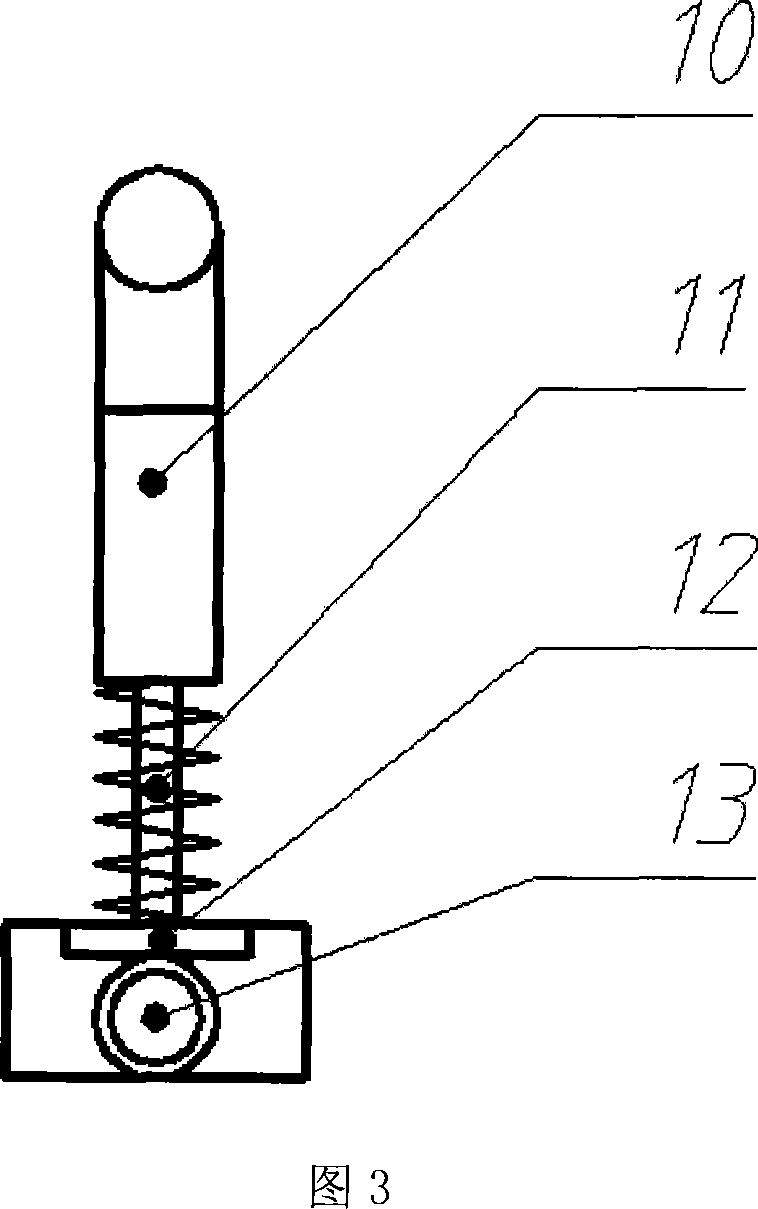
[0022] Combined with Figure 1 and Figure 2, the bionic locust jumping robot consists of a body, a front leg support shock absorbing mechanism is installed on both sides of the front end of the body, and a rear leg take-off mechanism is installed on both sides of the rear end of the body; at the same time combined with Figure 3, the front The leg support damping mechanism includes a sleeve 10 hinged on the body, one end of which is worn on the sleeve, and the other end is fixed to the support rod 12 with the palm piece 13. The support rod is covered with a stage clip 11; the rear leg take-off mechanism includes a body support Rod 4, transition link 5, calf 6, thigh 7, ground claw 8, the body support bar is fixed on the body 1, one end is hinged with the thigh, the other end is hinged with the transition link, the middle part of the calf is hinged with the transition...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More