

A fixed-wing unmanned aerial vehicle integrated navigation method with heading self-stitching
A fixed-wing unmanned aerial vehicle and integrated navigation technology, applied in the field of integrated navigation, can solve the problems of unfavorable rapid take-off, low speed accuracy of satellite positioning system, increased hardware cost, etc., so as to improve launch speed and reliability, save The effect of reducing the cost of hardware equipment in the link of ground course binding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
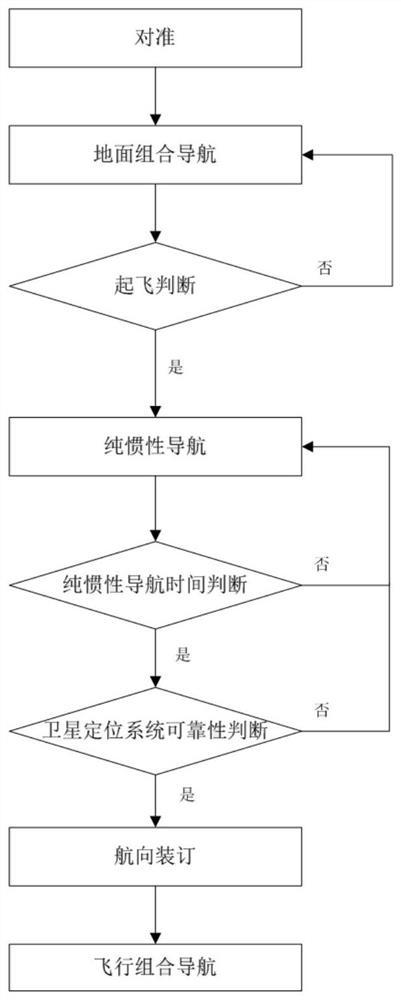
[0035] Fixed-wing UAVs can be divided into four stages: alignment, takeoff preparation, takeoff, and stable flight;
[0036] During the alignment phase, the UAV is still for about 3 minutes;
[0037] The take-off preparation stage takes a long time, generally lasting 10-20 minutes. During this stage, the UAV is stationary for a long time, but the change of the take-off heading and the operation of personnel before take-off may bring about a small maneuver in the horizontal attitude, and the accumulated heading error at this stage is large. Large and uncorrectable, which is quite unfavorable to the take-off process;
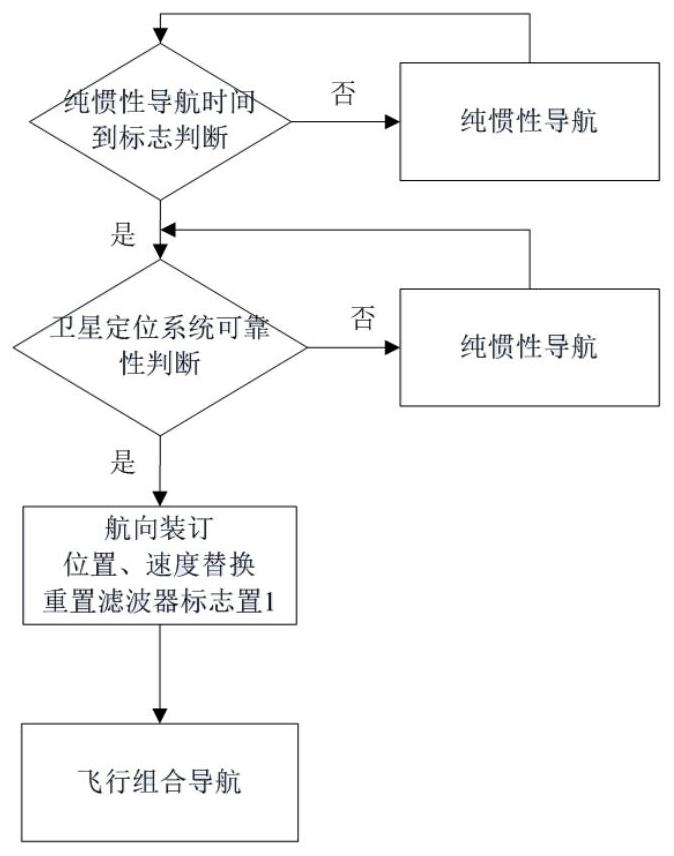
[0038] During the take-off phase, the acceleration of the UAV at the moment of take-off is relatively large, which often causes the satellite positioning system to fail to work normally or the positioning accuracy to decrease. It will return to normal after a period of time. The specific time is related to the take-off process and the performance of the satellite ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More