

Un-manned plane fairway layout method based on Voronoi graph and ant colony optimization algorithm
An ant colony optimization algorithm and route planning technology, applied in calculation, calculation model, instrument, etc., to achieve good real-time and fast results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
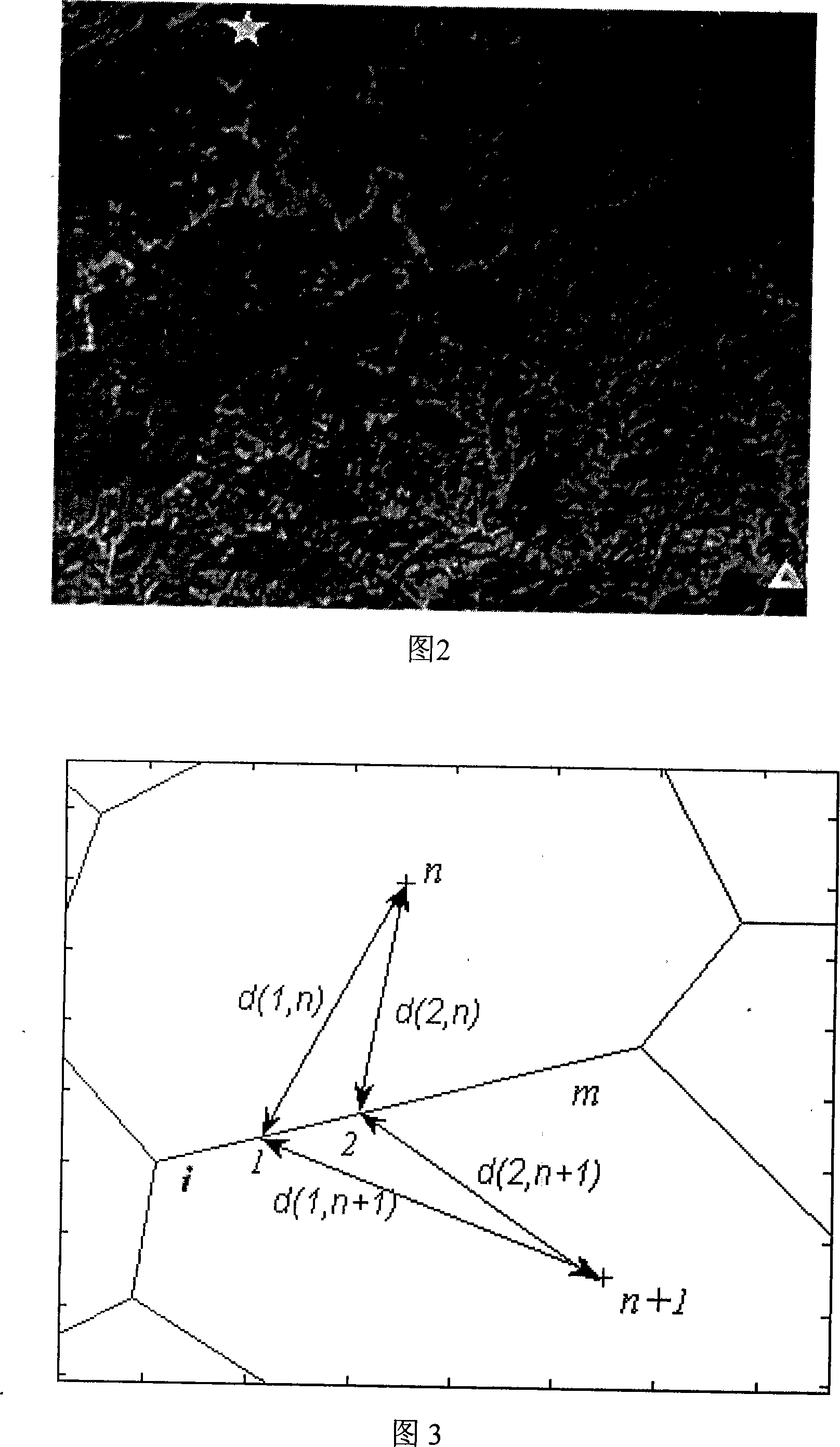
[0081] In order to verify the feasibility of the improved ant colony optimization algorithm for route planning in the Voronoi diagram, an adaptive route planning method for intelligent UAVs based on satisfactory decision-making ant colonies in the present invention is carried out using the UAV threat environment shown in Figure 2 The specific implementation steps of the experiment are as follows:
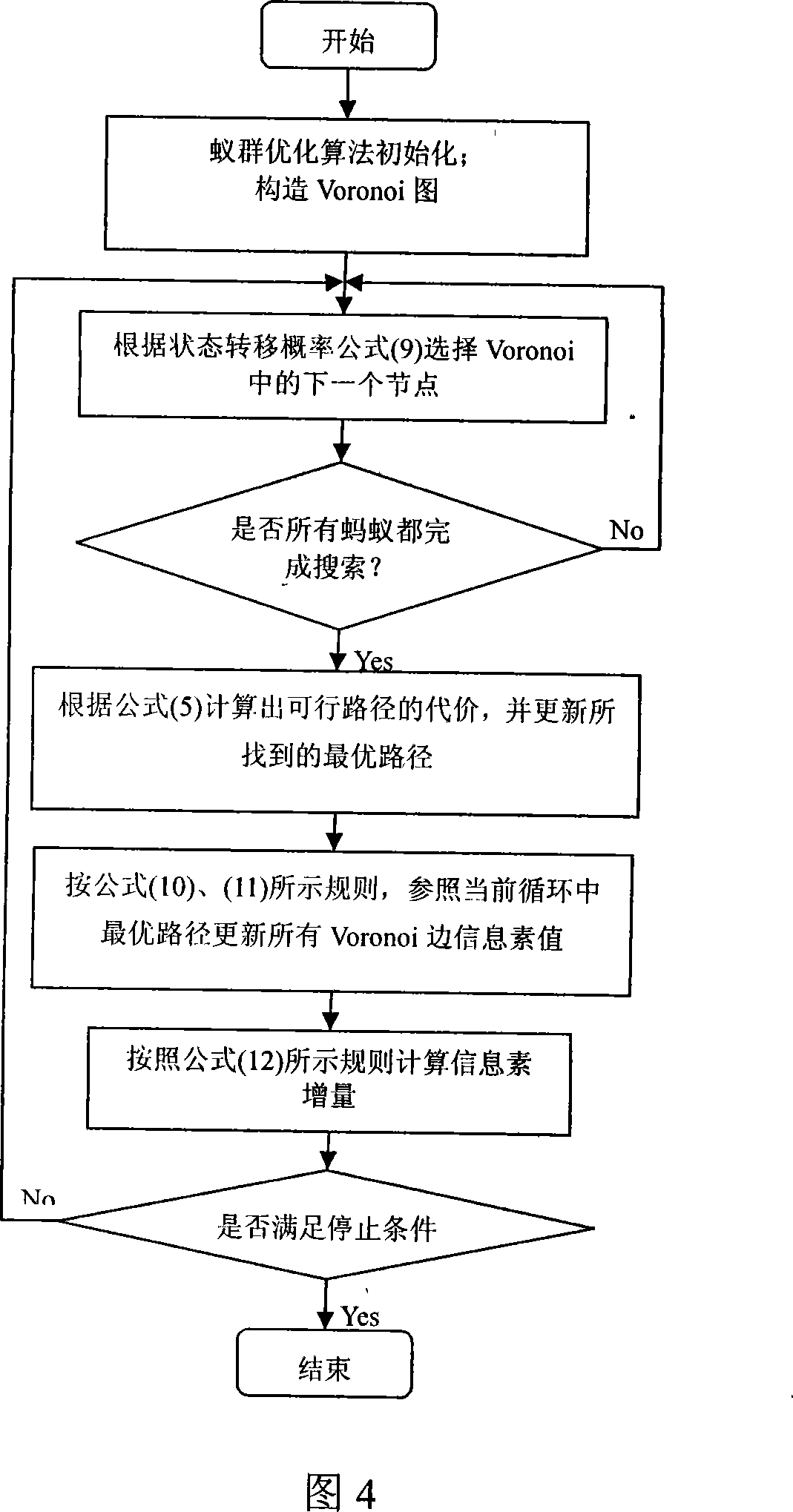
[0082] Step 1: Construct a Voronoi diagram according to the distribution of threat sources, and calculate the total cost of each edge in the Voronoi diagram; parameter initialization: num=30, α=2, β=5, ρ=0.1, Q=100, k=0.6 . Each edge of the Voronoi diagram is assigned an initial pheromone value;
[0083] Step 2: Place all ants on the Voronoi graph node closest to the starting point, and select the next node according to formula (9) until all ants complete the search process:
[0084] P k ( a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More