

Arm lifting type high voltage transmission line automatic polling robot
An automatic inspection and transmission line technology, applied in the field of robots, can solve the problems of difficulty in inspection of transmission lines, high cost and danger, and high labor intensity, and achieves improved quality and scientific management technology level, easy obstacle crossing, and operation. wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
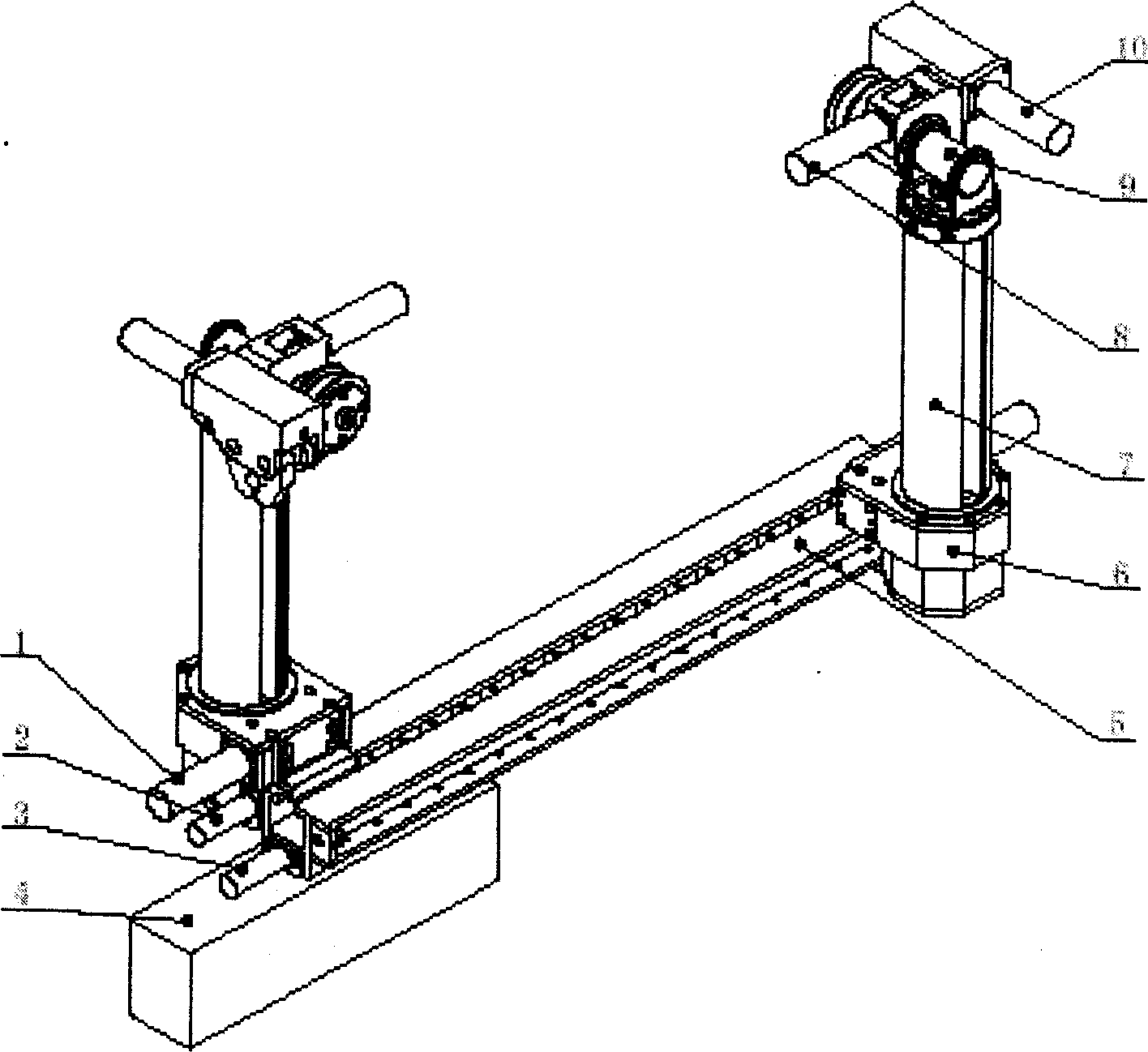
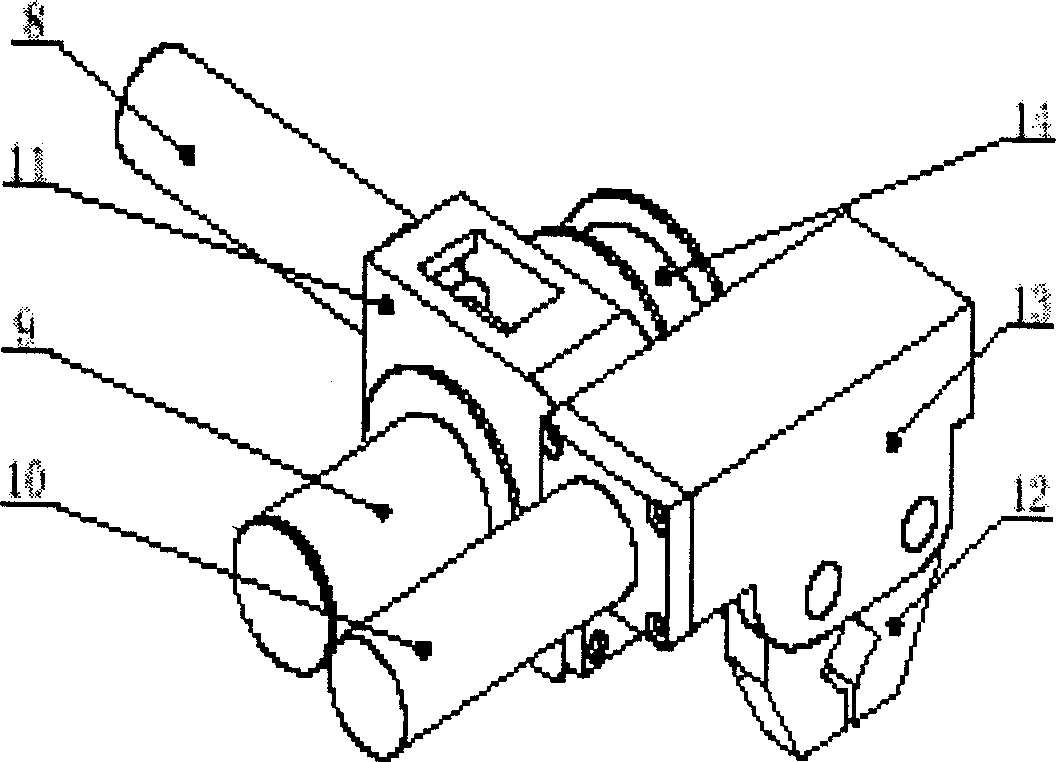
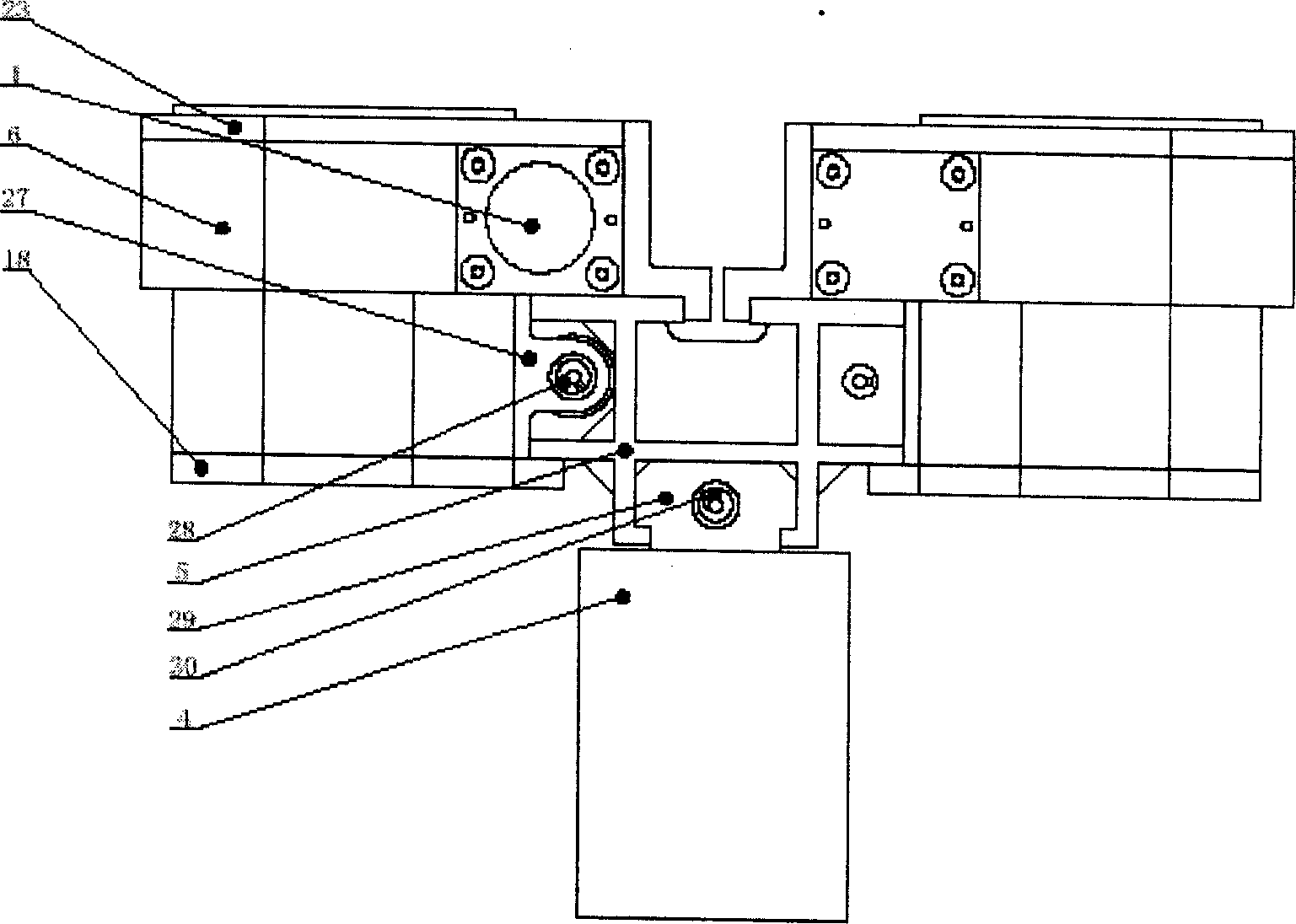
[0013] With reference to accompanying drawing 1-5, the embodiment that illustrates the structure of automatic inspection robot of arm lifting type high-voltage transmission line is as follows:
[0014] An arm lifting type automatic inspection robot for high-altitude power transmission lines includes two sets of claw mechanisms (FIG. 2), two sets of arm mechanisms 7, a machine base 5 and an electrical box 4. The claw mechanism can realize the sliding of the robot along the transmission line, and can not only clamp the wire but also clamp the angle steel of the iron tower when crossing obstacles. The arm mechanism 7 is connected with the claw mechanism and the machine base, which can realize the lifting of the claw mechanism relative to the machine base, and can drive the claw to rotate around the vertical axis. The screw mandrel 28 nut 27 on the support 5 can make the arm move in parallel along the length direction of the guide rail of the support. The image acquisition, contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More