

Method for online real-time removing oscillation error of optical fibre gyroscope SINS system
A technology of fiber optic gyroscope and oscillation error, which is applied in the direction of navigation through speed/acceleration measurement, and can solve the problems of reduced system reliability, reduced system autonomy, and oscillation error of the fiber optic gyroscope strapdown inertial navigation system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
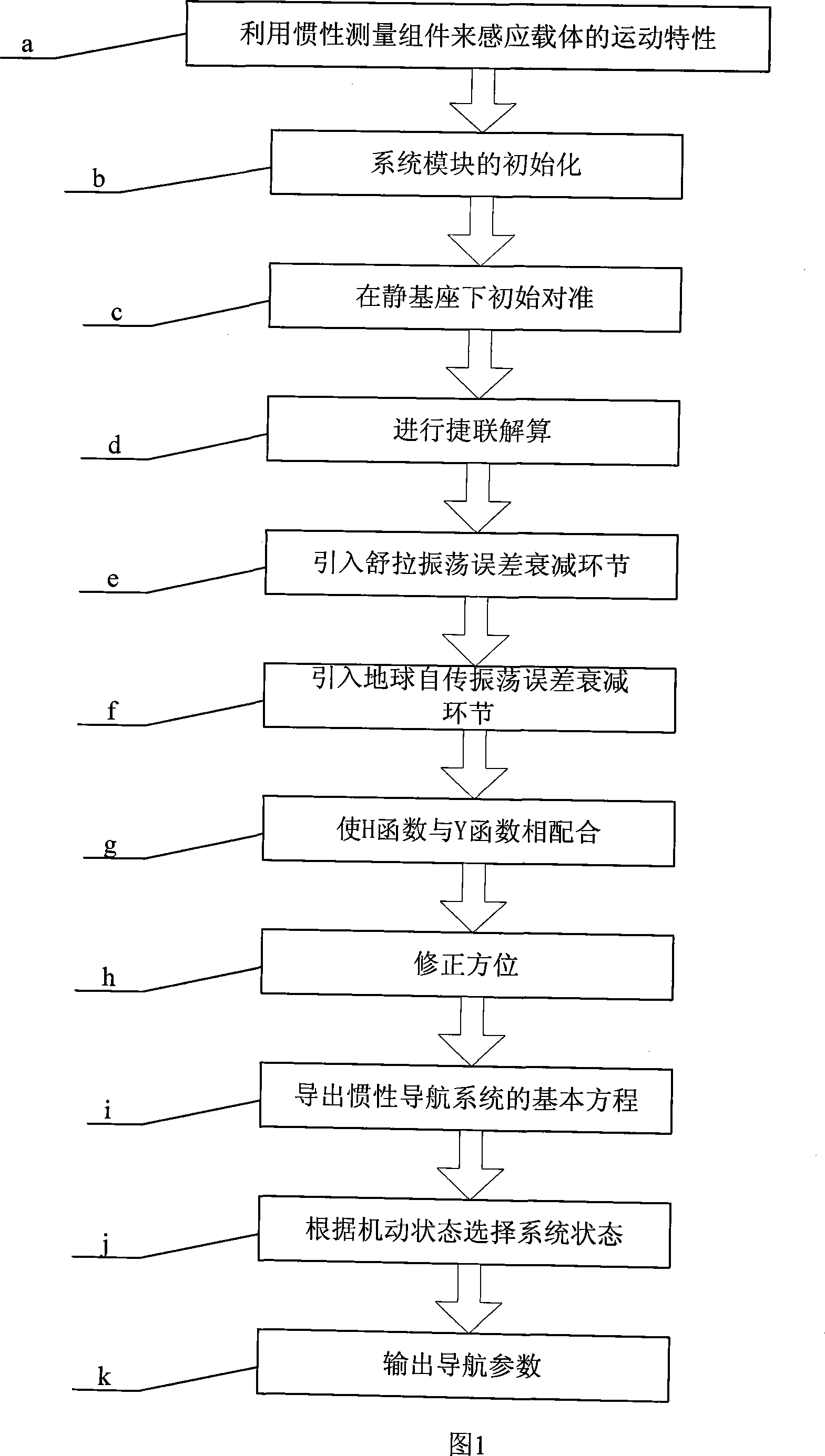
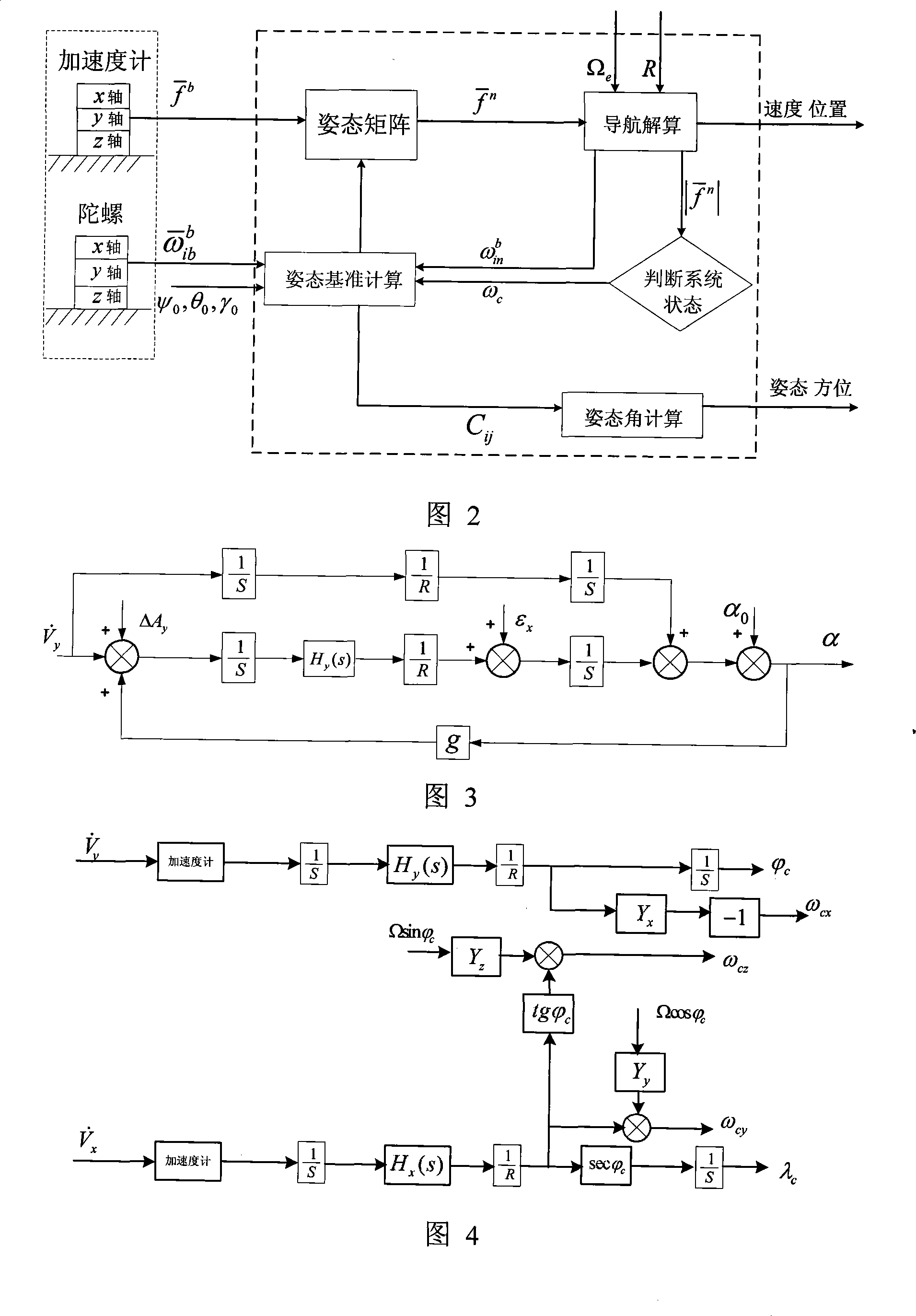
[0037] Specific embodiment one: referring to Fig. 1, Fig. 2 and Fig. 4, the hardware composition of the strapdown inertial navigation system in this embodiment is the same as that of the traditional strapdown inertial navigation system, and the specific method includes the following steps:
[0038] Step a, using an inertial measurement component (inertial measurement component) composed of a fiber optic gyroscope with three degrees of freedom and a quartz accelerometer with three degrees of freedom to sense the motion characteristics of the carrier: the inertial measurement component is sensitive to the movement of the carrier along its axis through the fiber optic gyroscope Angular velocity signal, the linear acceleration signal along the axis of the carrier is measured by the accelerometer, and the signal is transmitted to the computer;
[0039] Step b. Initialization of system modules: the fiber optic gyro strapdown inertial navigation system should generally be started unde...
specific Embodiment approach 2
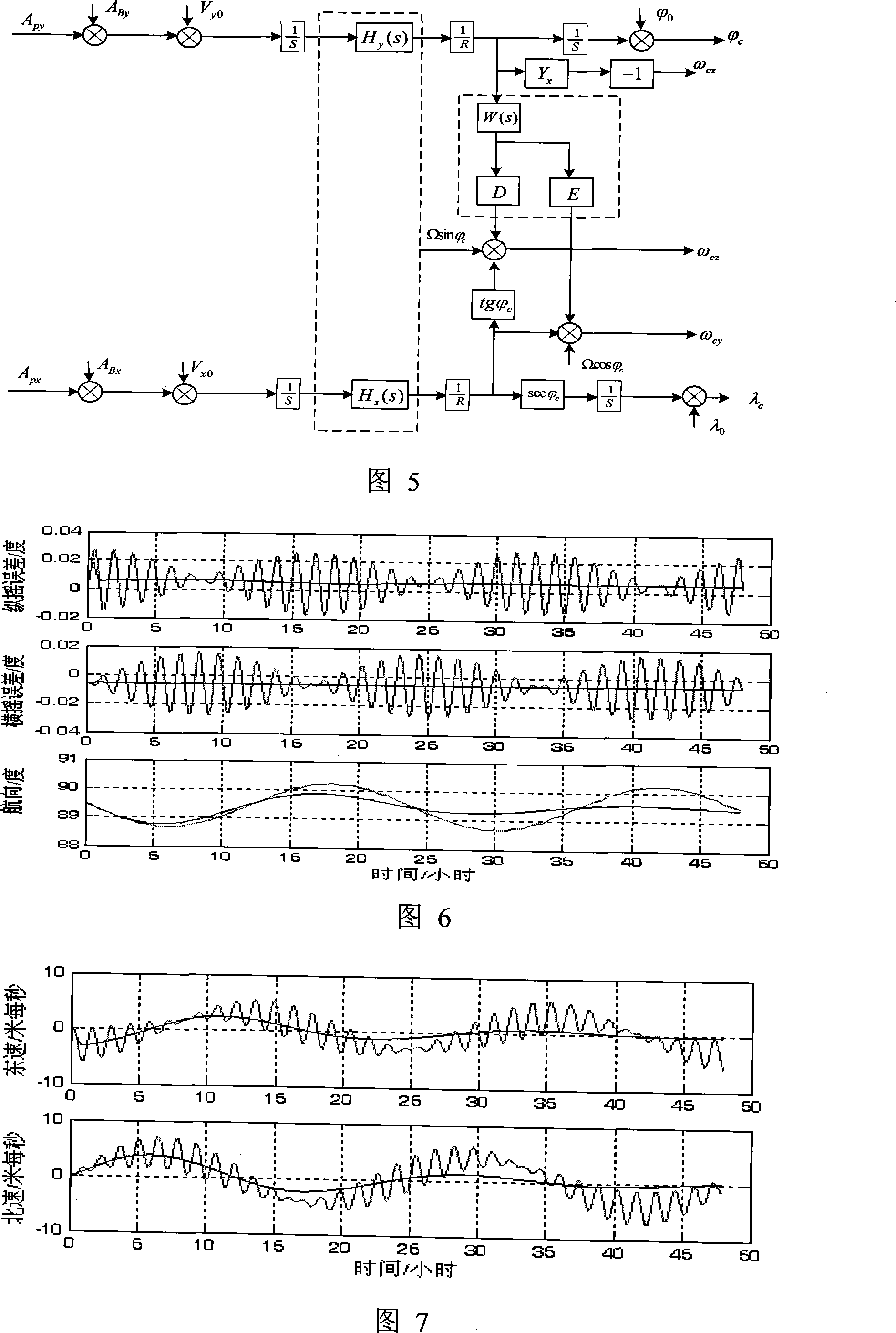
[0073] Specific embodiment two: see Figure 5, according to specific embodiment one, for better simplification
[0074] ω x = - Y x V cy R M H y
[0075] For the convenience of structure and use, the formula in step f Simplified to the following form:
[0076]
[0077] Order Y x (s)=Y y (s)=Y z (s), W = Ω s ( 1 - Y ) ,
[0078] ω x = - V cy R M H y
[0079] Then there are:
[0080]
specific Embodiment approach 3
[0081] Specific embodiment three: Referring to Fig. 3, the difference between this embodiment and specific embodiment one is that in step e, in the Shura circuit of the single-channel northward horizontal circuit, after the first integrator, before the second integrator, a series connection is added. The oscillation error attenuation link H y (s), when H y When (s)=1, the strapdown inertial navigation system is in an undamped state. At this time, the acceleration and velocity have no effect on the horizontal error angle, but other disturbances will produce an oscillating error component on the horizontal error angle, with a period of 84.4 minutes , that is, the Shura period oscillation, when H y When (s) is not 1, the horizontal inclination oscillation error generated by various disturbances will gradually attenuate, but for the error component of the navigation parameters generated by acceleration and velocity, what we hope is to add this link to make the oscillation The er...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More