

Two freedom mobile parallel connection decoupling mechanism
A degree of freedom, parallel technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of low stiffness, difficult calibration, complex control of parallel mechanisms, etc., to achieve good force characteristics, high motion accuracy, and high transmission efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The following describes the embodiments of the present invention in detail with reference to the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation and specific operation procedures, but the scope of protection of the present invention is not limited to the following Mentioned examples.
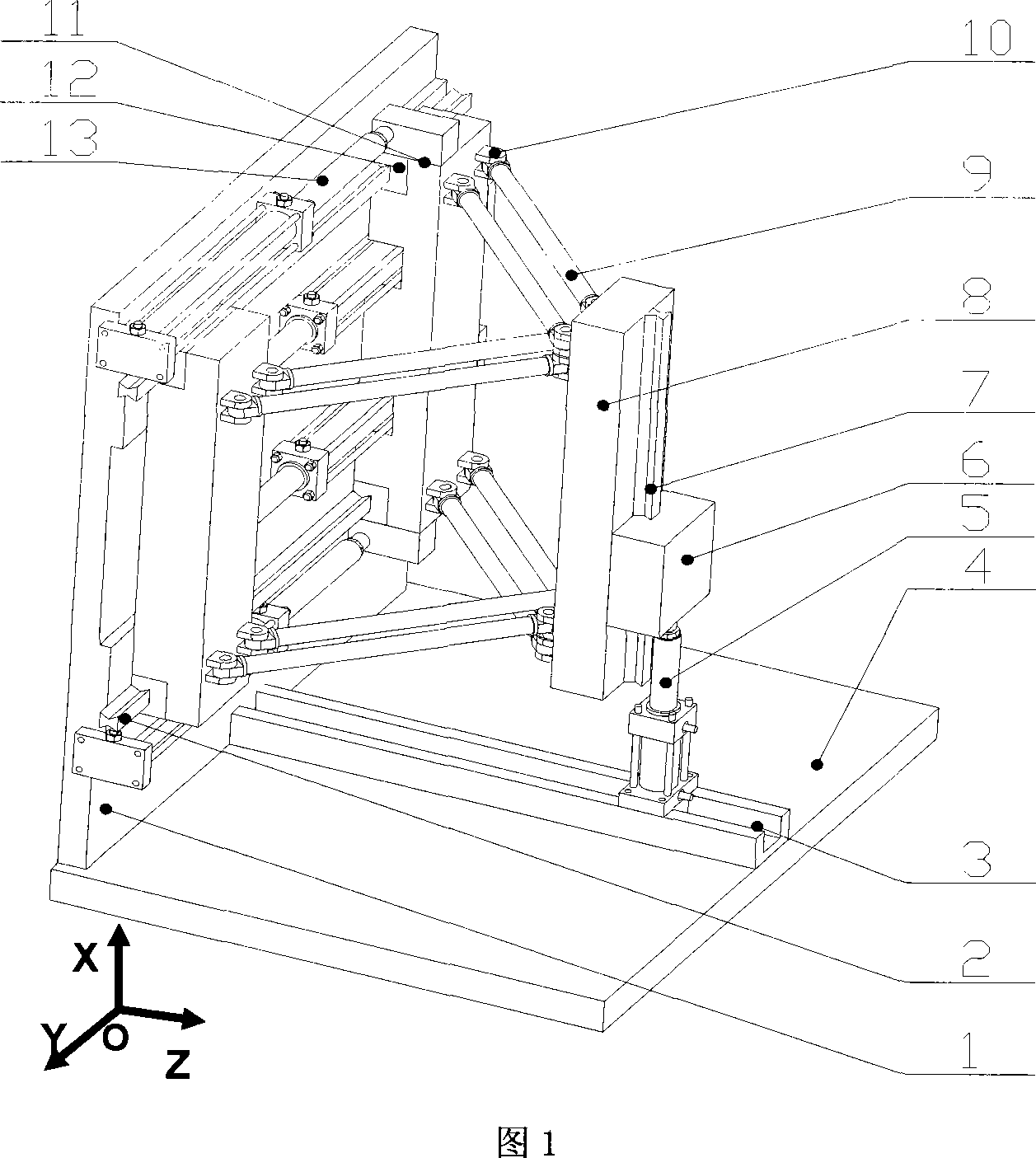
[0015] As shown in Figure 1, this embodiment includes the following components: 1-XOY basic platform, 2-Y guide rail, 3-Z guide rail, 4-YOZ basic platform, 5-X driving device, 6 moving platform, 7- X-direction guide rail, 8-upper support, 9-support rod, 10-rotation pair, 11-lower sliding support, 12-Y slide, 13-Y drive. Two Y-direction guide rails 2 are fixed on the XOY basic platform 1, the Z-direction guide rail 3 is fixed on the YOZ basic platform 4, the Y-direction slider 12 is fixed on the Y-direction guide rail 2, and the two lower sliding supports 11 are respectively fixed to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More