

Vehicle distance measuring method based on binocular vision
A measurement method and binocular vision technology, which can be used in line-of-sight measurement, measurement device, measurement distance, etc., and can solve problems such as large measurement errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
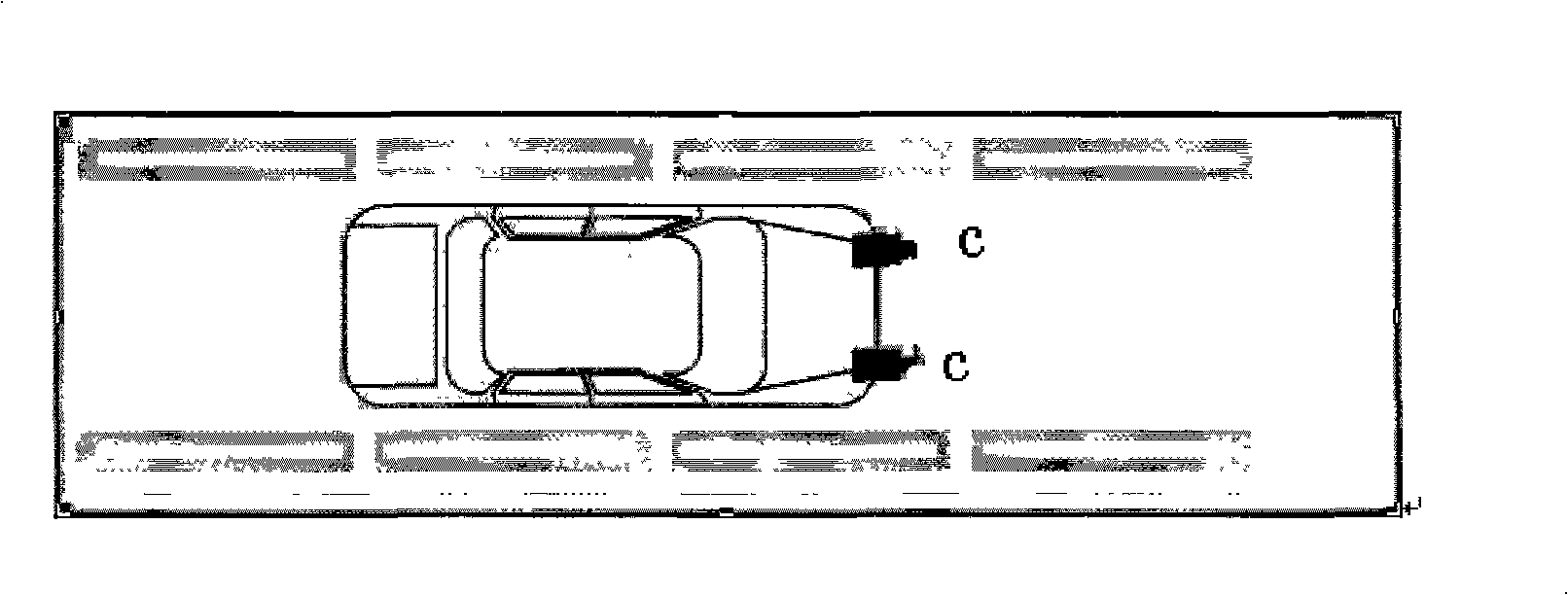
[0052] Such as figure 1 As shown, two cameras are installed behind the windshield of the vehicle, and the placement of the two cameras is adjusted so that the two cameras have a common field of view, and the common field of view can contain most of the information on the road ahead.
[0053] The high accuracy of stereo vision measurement depends on two premises, one is that the measuring point of the preceding vehicle is correct, and the other is that the camera calibration parameters are correct.
[0054] Since the vehicle is an artificial rigid body, its rear image has the following characteristics:
[0055] (1) Compared with the natural scenery on the road, the edge of the vehicle has the characteristics of obvious edge, continuous, and the direction is approximately vertical or horizontal;
[0056] (2) When viewed from the back, the outline of the vehicle is generally rectangular;
[0057] (3) There is a big difference between the texture of the back of the vehicle and the te...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More