

Sound source independent searching and locating method
A positioning method and sound source technology, applied in positioning, measuring devices, instruments, etc., can solve problems such as being easily affected by obstacles and light, and achieve the effect of strong applicability and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
specific Embodiment
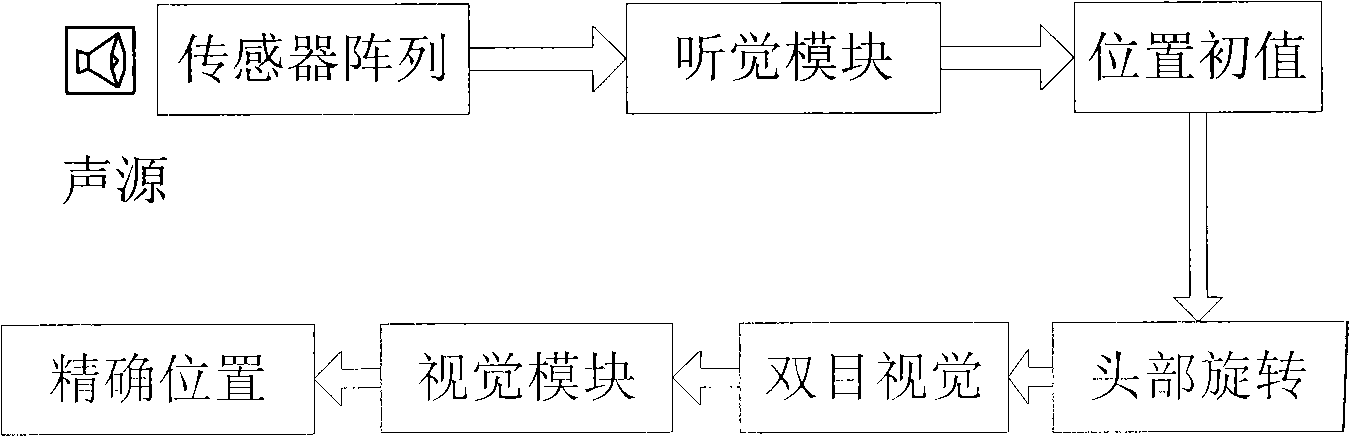
[0020] The sound source self-searching positioning method (abbreviation positioning method of the present invention design, see Figure 1-6 ) is based on a mobile robot (referred to as a robot) with a sensor array and a binocular camera installed on the anthropomorphic head of the robot. The binocular camera is arranged on the binocular positions of the robot anthropomorphic head; the anthropomorphic head of the robot can be rotated left and right by 180 degrees (that is, 360 degrees of rotation). According to the ground conditions of different practical application environments, mobile robots can adopt wheeled mobile robots, crawler mobile robots or wheel-track composite mobile robots.
[0021] The positioning method of the present invention adopts the following steps:
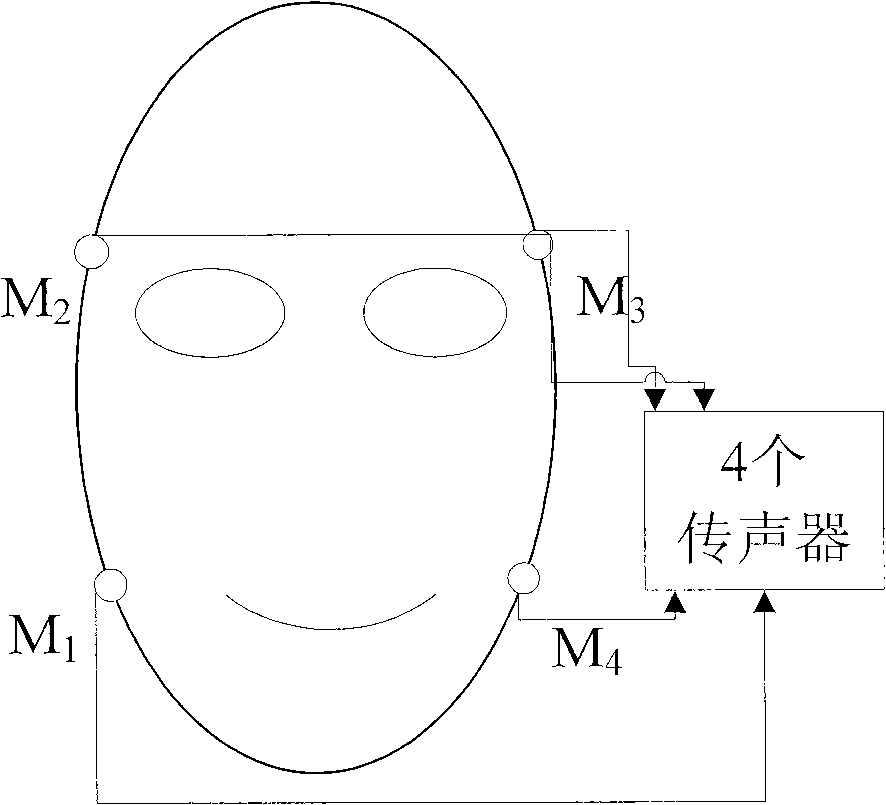
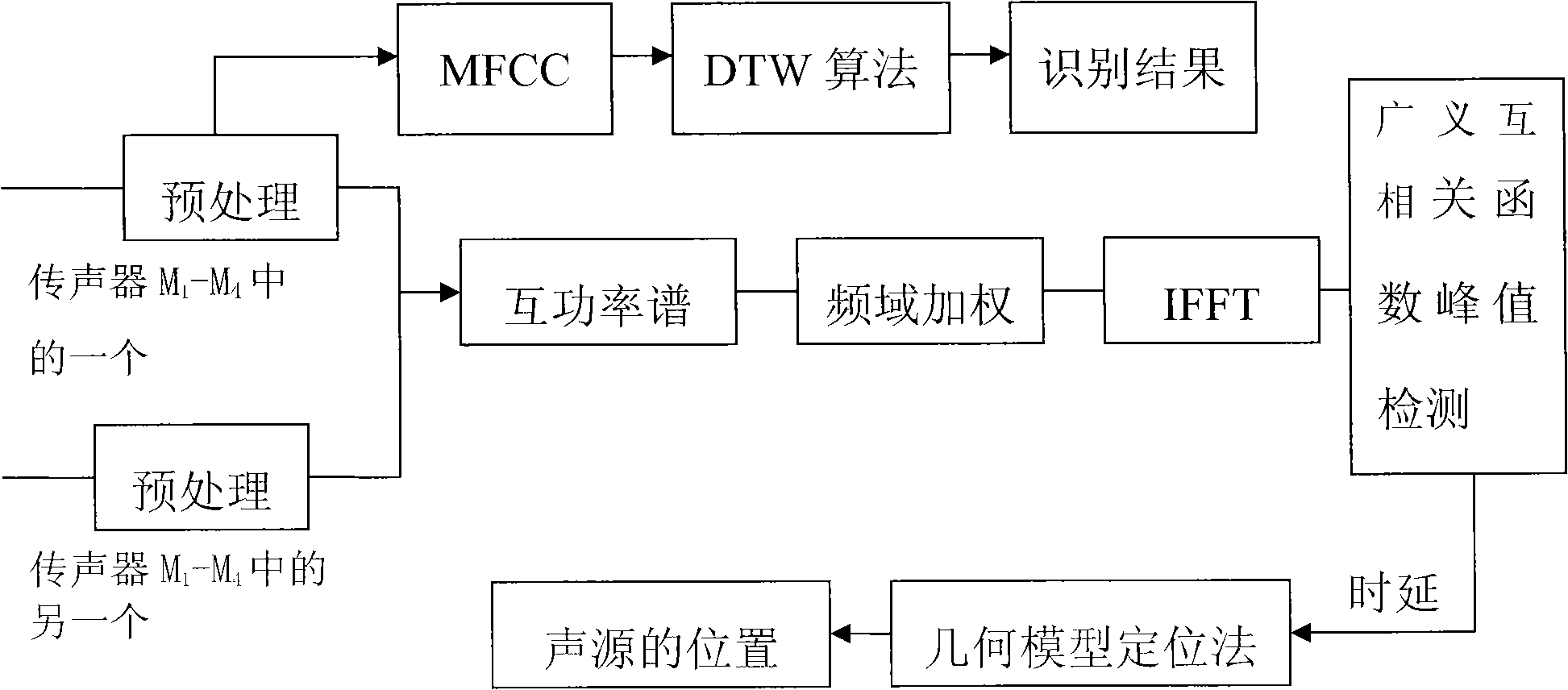
[0022] First, use the microphone array to initially locate the target sound source. Described sound transmitting array embodiment is by 4 microphones (namely M 1 -M 4 )composition. 4 microphones M 1 -M ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More