

Hand prosthesis
A finger prosthesis and palm technology, applied in the field of hand prosthesis, can solve the problems of troublesome, high susceptibility to interference, etc., and achieve the effect of stable pressure and reliable grip
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
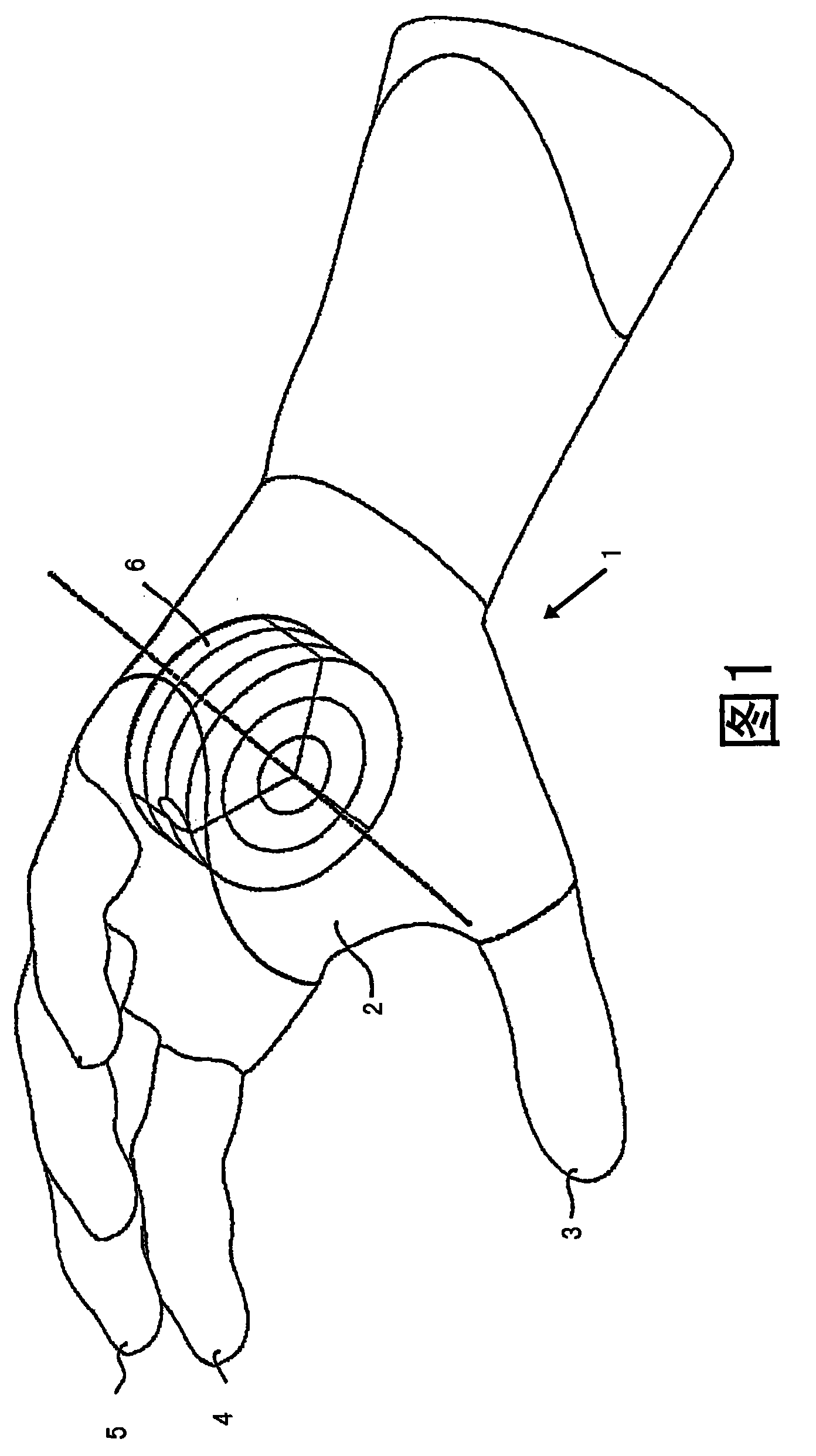
[0023] FIG. 1 shows a hand prosthesis 1 comprising a hand base frame 2 and at least three finger prostheses 3 , 4 , 5 mounted on the hand base frame 2 in an articulated manner. The finger prostheses 3, 4, 5 correspond to the thumb, index and middle fingers of a natural hand. The movable bearings of the three finger prostheses 3 , 4 , 5 , which can be actuated by a common drive 6 , are sufficient to perform multiple gripping tasks of the hand. The remaining two fingers, the ring finger and the little finger, can move passively together and are made of elastomer material in order to achieve as natural a feel as possible. The drive unit 6 in the form of an electric motor and its associated transmission are mounted inside the hand base frame 2 . An energy source (not shown) for the drive device 6 can also be arranged inside the hand base 2 . The drive device 6 is controlled via a control device which can be arranged in the hand base 2 . Corresponding signals can be generated by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More