

Modular six freedom-degree initiative joint type bipod walking robot
A walking robot and active joint technology, applied in the field of robotics, can solve the problems of weak walking ability and complex structure of passive walking robots, and achieve the effects of simple manufacturing and maintenance, easy construction and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to better understand the present invention, the present invention will be further described below in conjunction with the accompanying drawings, but the embodiments of the present invention are not limited thereto.
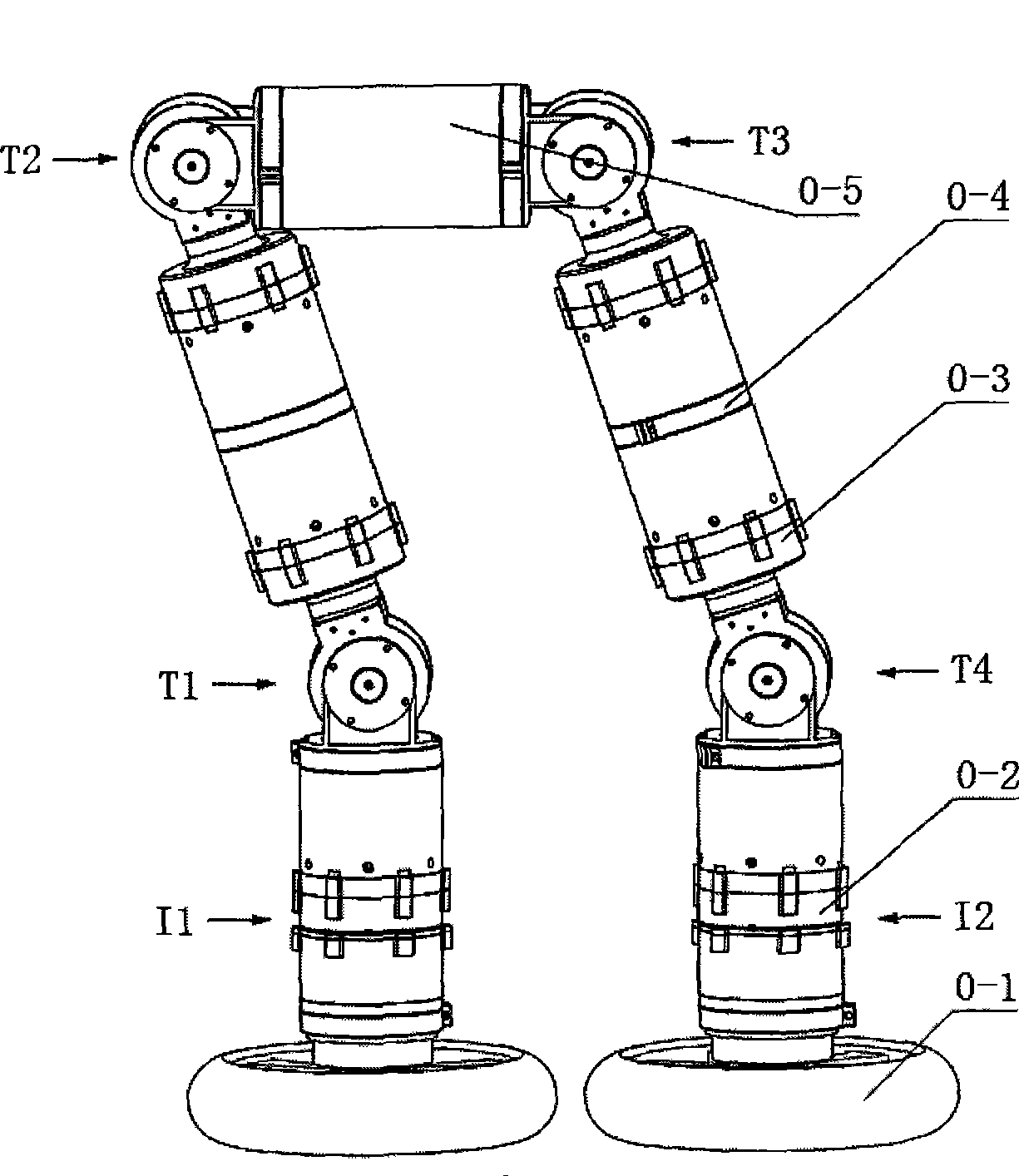
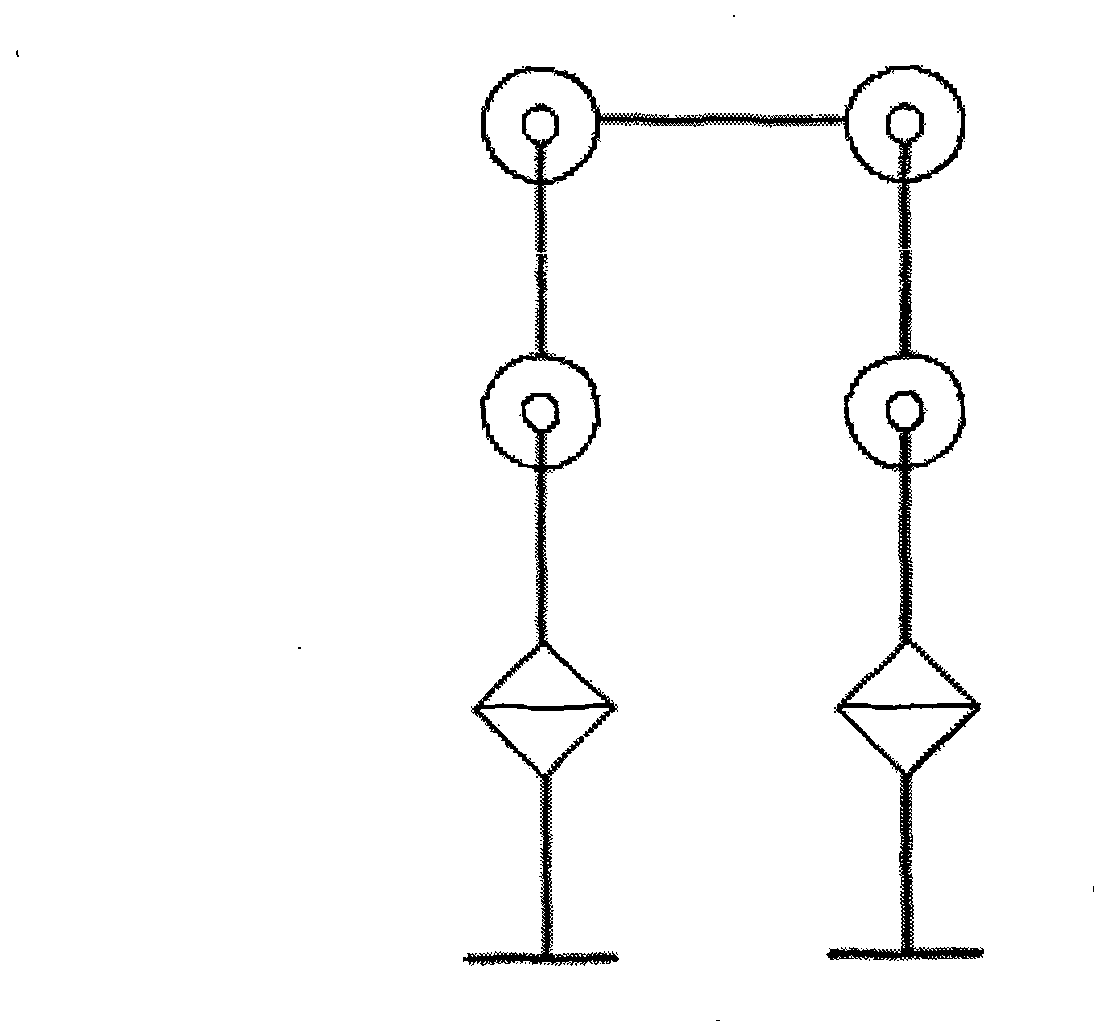
[0033] figure 1 and figure 2 The appearance diagram and mechanism schematic diagram of the robot constructed by the present invention are respectively shown. As shown in the figure, the robot has six degrees of freedom and a total of eight modules. The main body is composed of six joint modules 0-2 and 0-3, and a foot module 0-1 is connected to each end. Each module is sequentially connected in series, and the sequence is: foot—force sensor—I-type joint—T-type joint—T-type joint—T-type joint—T-type joint—I-type joint—force sensor—foot. There are four T-joint modules 0-3 in the middle, and a transition sleeve 0-4 in the middle to adjust the connection distance. Each joint module is connected with snap ring 0-4. The longitudinal section of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More