

Adaptive controller independent to model and control method thereof
A technology of adaptive controller and control method, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as complex internal mechanism of a single network, single neural network structure, and slow system response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] 1. The composition of the controller of the present invention
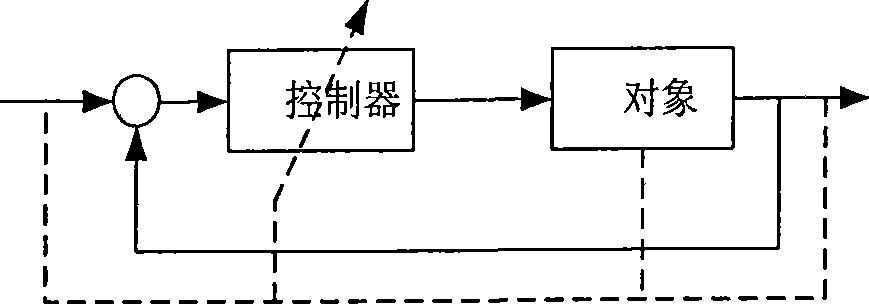
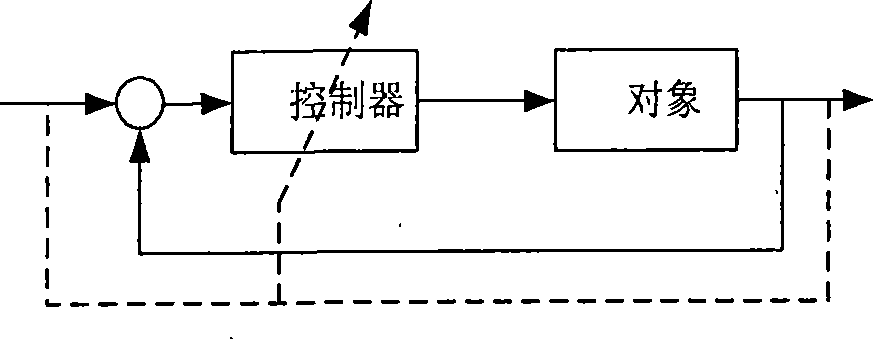
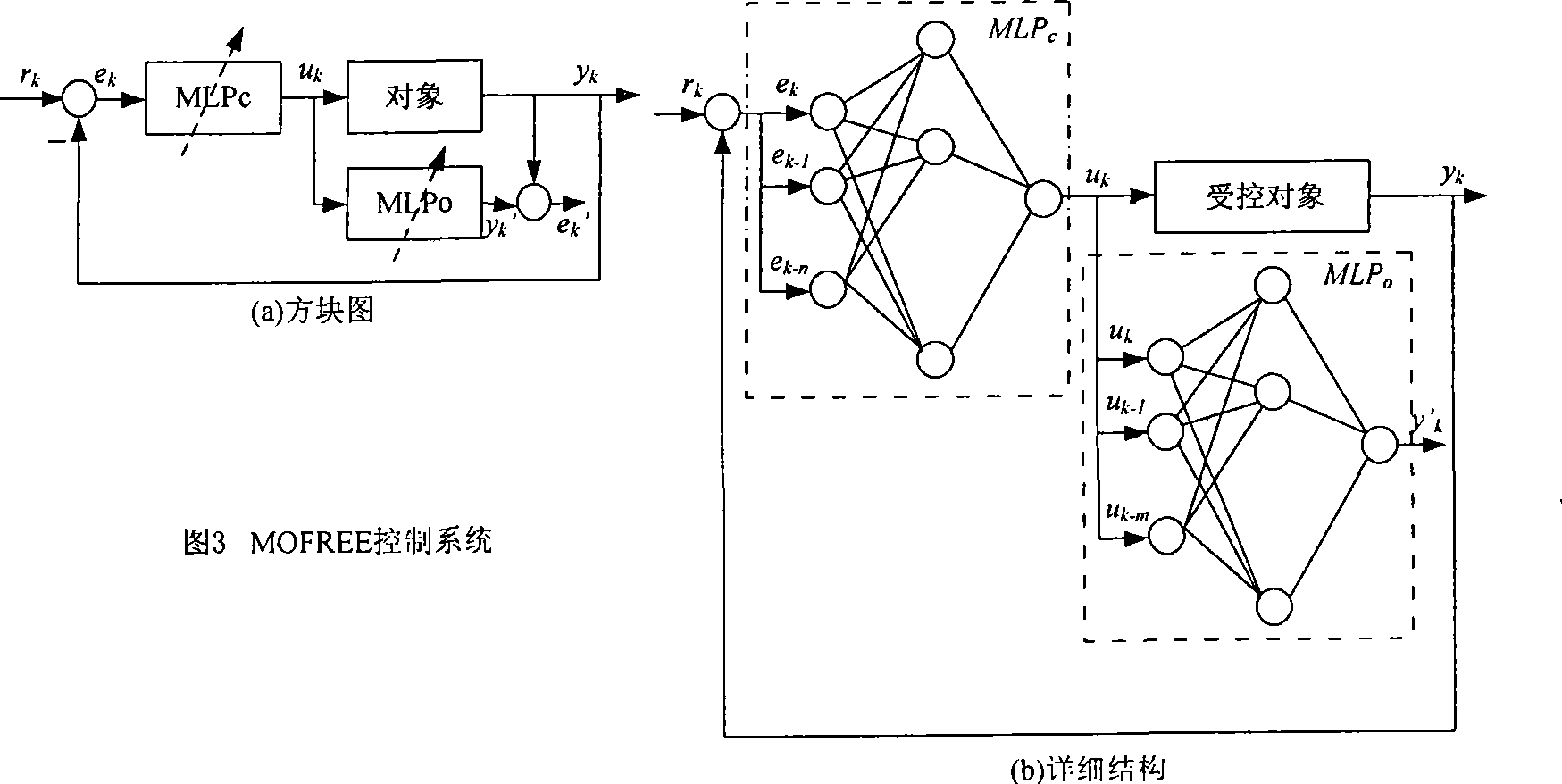
[0031] The controller is composed of two forward neural networks connected in series, the former neural network is the network controller MLPc, the latter neural network is the network simulator MLPo, and the output of the network controller is used as the input of the network simulator and the controlled object , there is a closed-loop negative feedback between the output of the controlled object and the input of the network controller, the output of the network simulator and the output of the controlled object are set to a subtractive relationship, and the difference error between the two is used for the network simulator The retraining process of MLPo.
[0032] The network simulator MLPo is modeled by a time-delay multilayer perceptron (TDMLP) according to the input and output pairs of the controlled object; the network controller MLPc is composed of another time-delay multilayer perceptron (TDMLP), and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More