

Bionic leg with three-dimensional force perception and spatial surface self-adaptive ability
A three-dimensional force and self-adaptive technology, applied in the field of legged robot motion realization and bionic legs, can solve the problems of complex structure design, calculation principle and manufacturing, complex design principle and processing technology, and difficulty in three-dimensional force detection of robots. The effect of light weight, simple structure and convenient processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
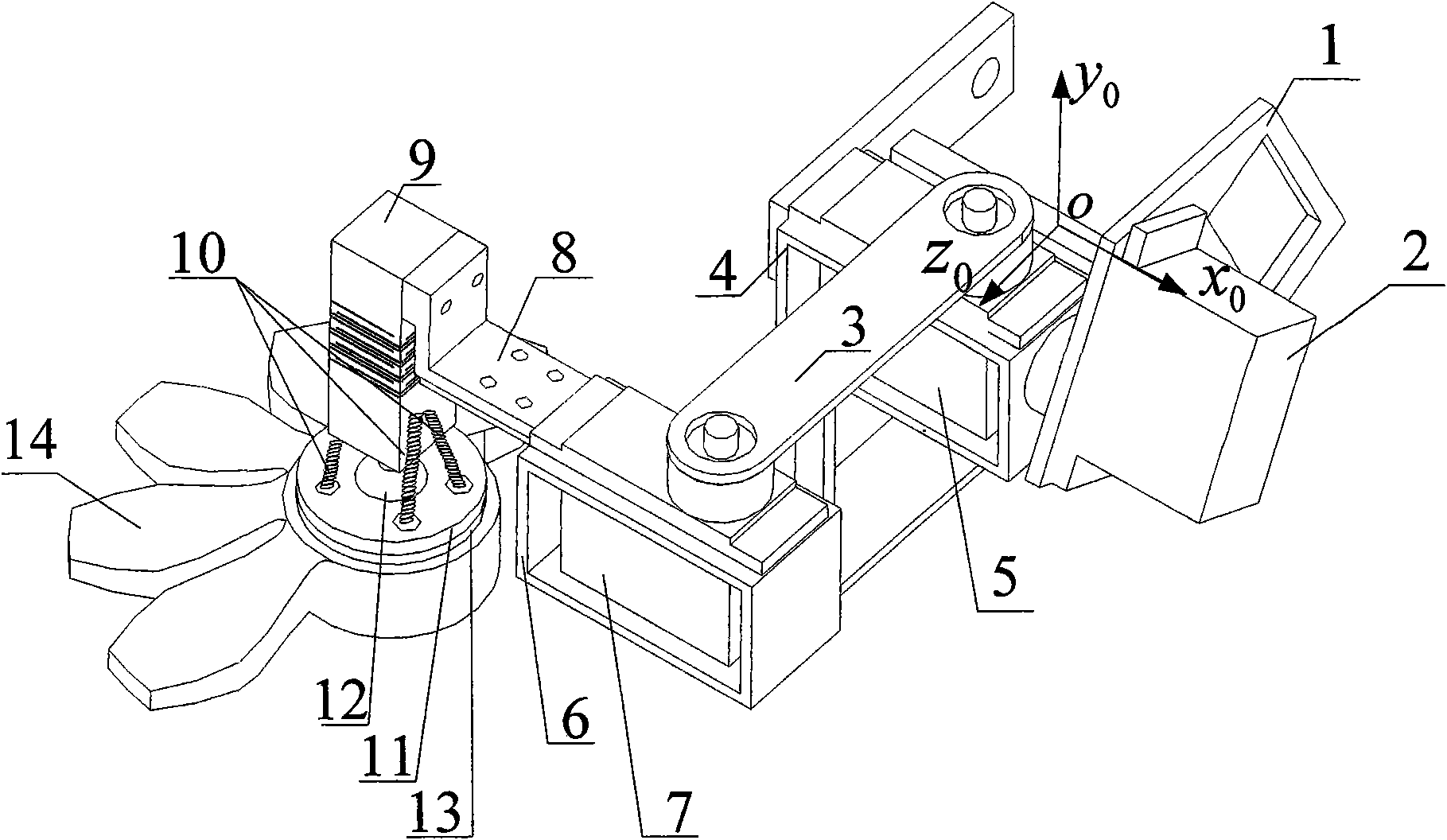
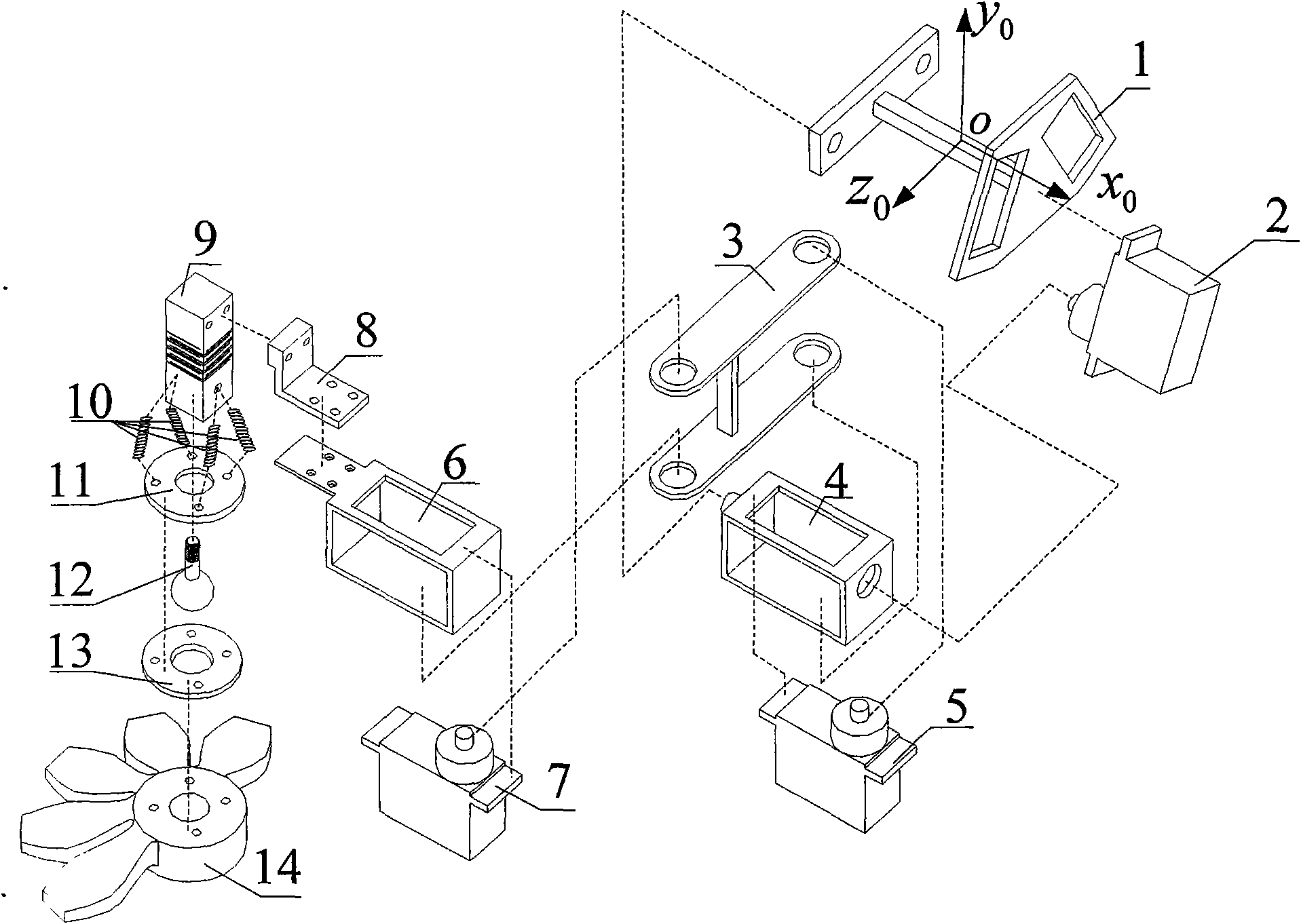
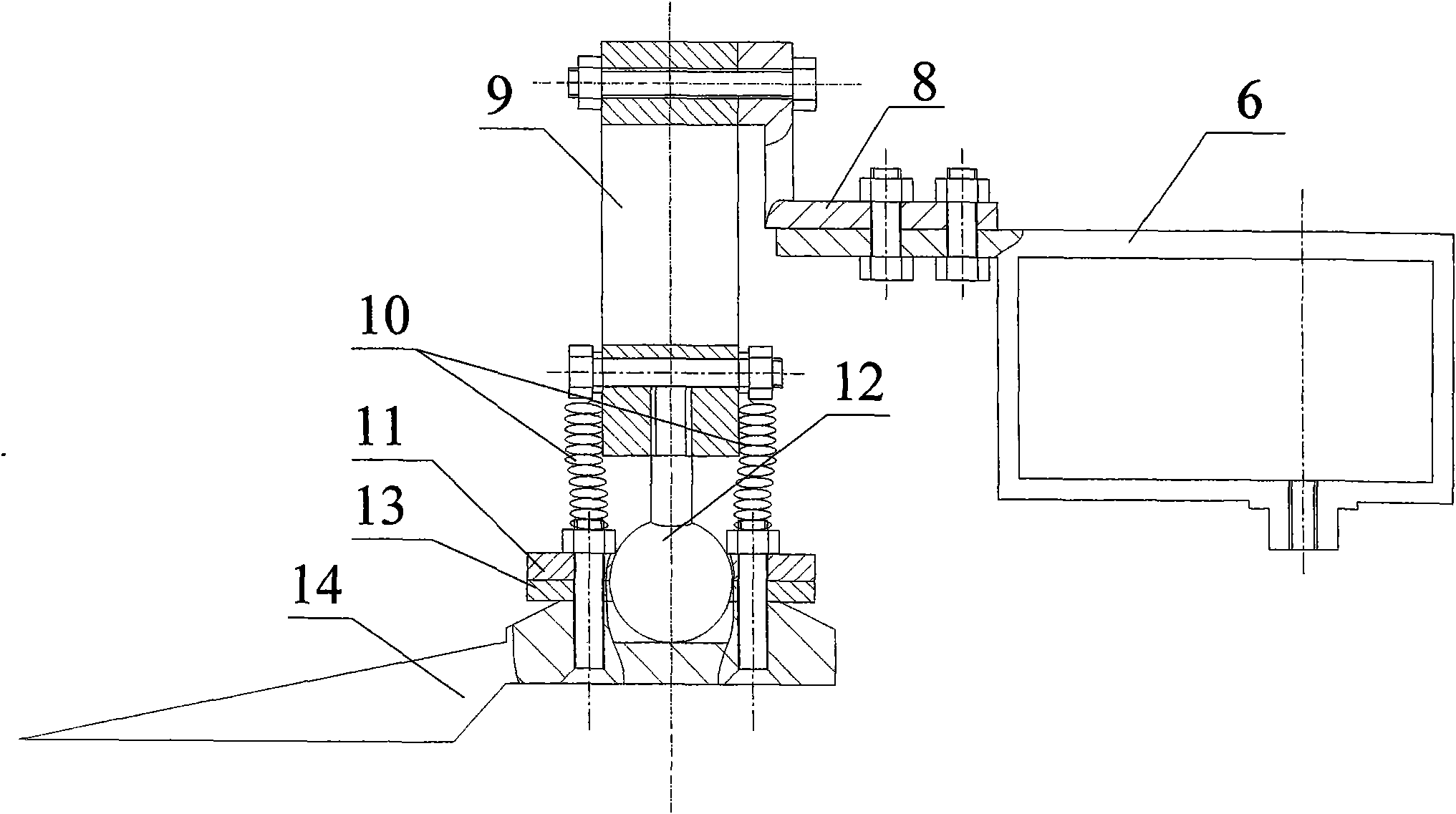
[0025] combine Figure 1-9 , the present embodiment is a bionic leg with three-dimensional force perception and space surface adaptive ability, including a robot base 1, a No. I hip joint steering gear 2, a thigh 3, a hip joint steering gear bracket 4, and a No. II hip joint steering gear 5 , knee joint steering gear support 6, knee joint steering gear 7, connecting plate 8, three-dimensional force sensor 9, 4 return springs 10, ball joint end cap 11, ball head 12, ball joint gasket 13 and sole 14. Such as figure 2 As shown, the No. I hip joint steering gear 2 is fixedly connected with the robot base 1, the rotation output rotation shaft of the No. I hip joint steering gear 2 is fixedly connected with one end of the hip joint steering gear bracket 4, and the other end of the hip joint steering gear bracket 4 is connected with the The robot ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More