

Reversible and amphibious multi-legged robot with variable postures
A multi-legged robot and attitude-changing technology, which is applied in motor vehicles, electromechanical devices, and control of mechanical energy, etc., can solve the problems of poor adaptability to amphibious environments, no ability to swim, and invariable attitudes, and achieve flexible activities, concentrated weight, Increase the effect of inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention is described in more detail below in conjunction with accompanying drawing example:
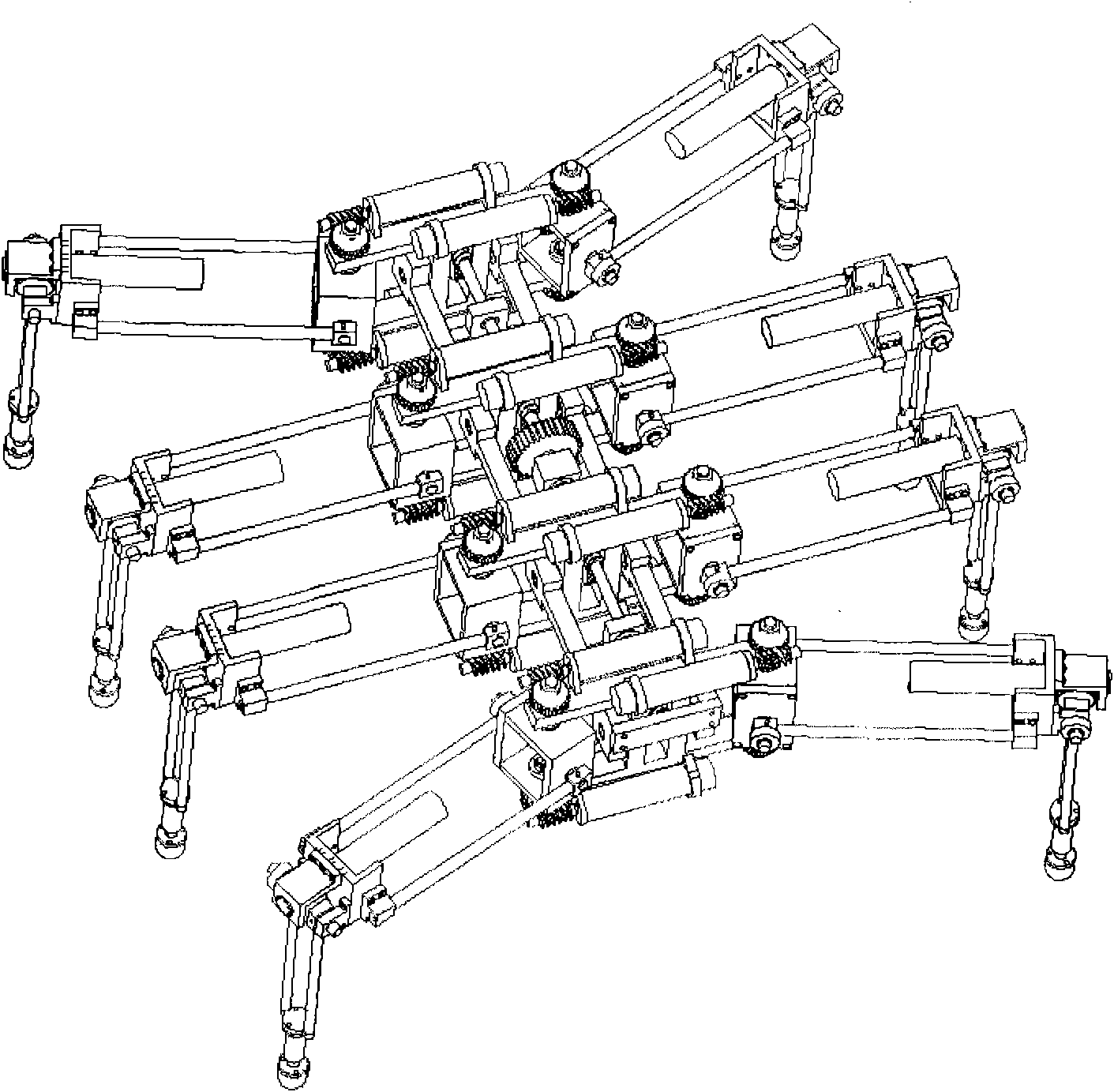
[0022] combine figure 1 , the posture-changing reversible amphibious multi-legged robot of the present invention is composed of three parts: a body support, a one-way input vertical output module, and a leg mechanism.
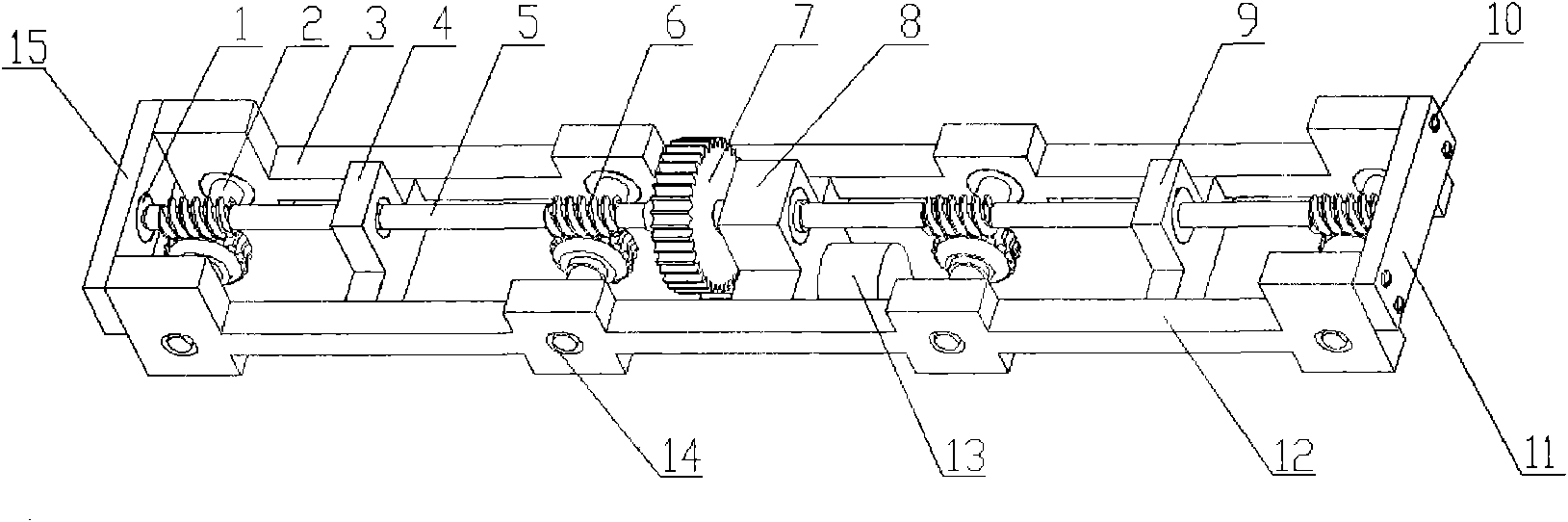
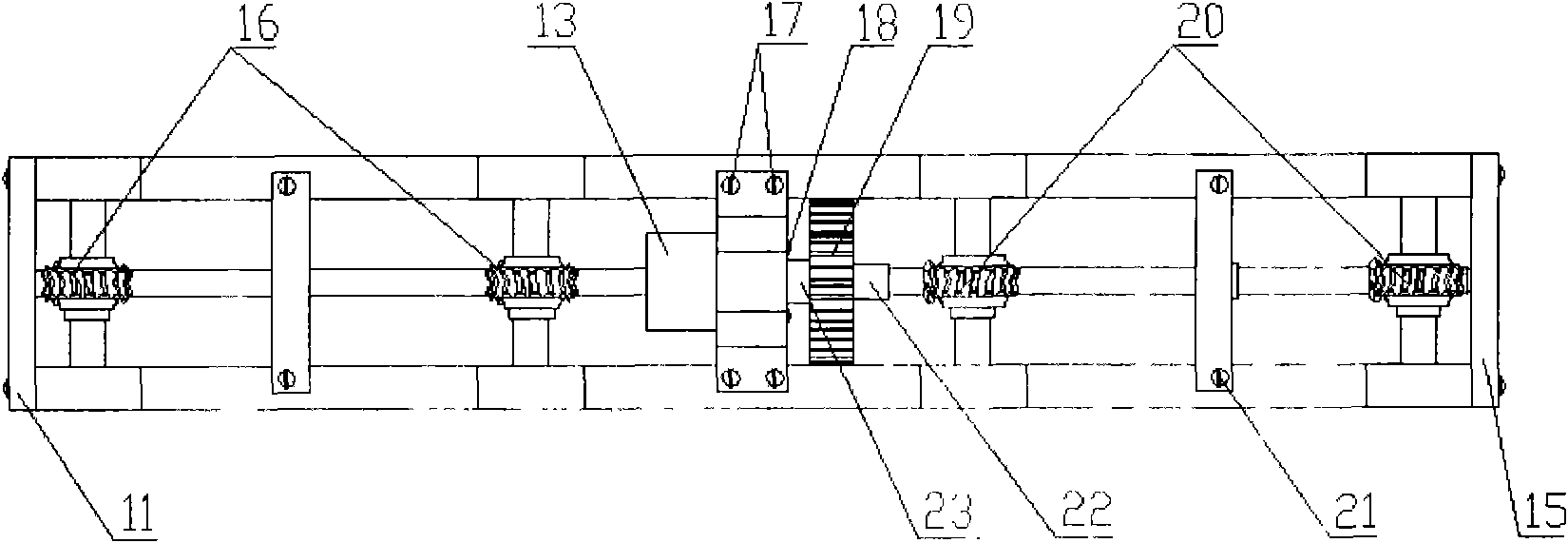
[0023] combine figure 2 and image 3 , the body bracket is the matrix connecting 8 walking feet, and there is a left and right spiral worm gear mechanism inside, which can realize the change of the robot's own posture. It specifically includes: worm bearing 1, worm shaft 2, right bracket 3, front worm fixing seat 4, worm shaft 5, worm wheel 6, large spur gear 7, motor fixing seat 8, rear worm fixing seat 9, end cover Screw 10, rear end cover 11, left bracket 12, attitude adjustment motor 13, worm gear bearing 14, front end cover 15, left-handed worm gear 16, fixed motor base screw 17, fixed motor screw 18, small spur gear 19, right-handed worm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More