

A walking obstacle crossing mechanism of an inspection robot
A technology for inspection robots and walking mechanisms, applied in the field of mobile robots, can solve the problems of difficulty in applying ultra-high voltage transmission line inspection operations, limited obstacle crossing ability, poor safety protection, etc., and achieves easy climbing of large-angle lines and obstacle crossing ability. The effect of strong, strong walking ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in further detail below in conjunction with the accompanying drawings.
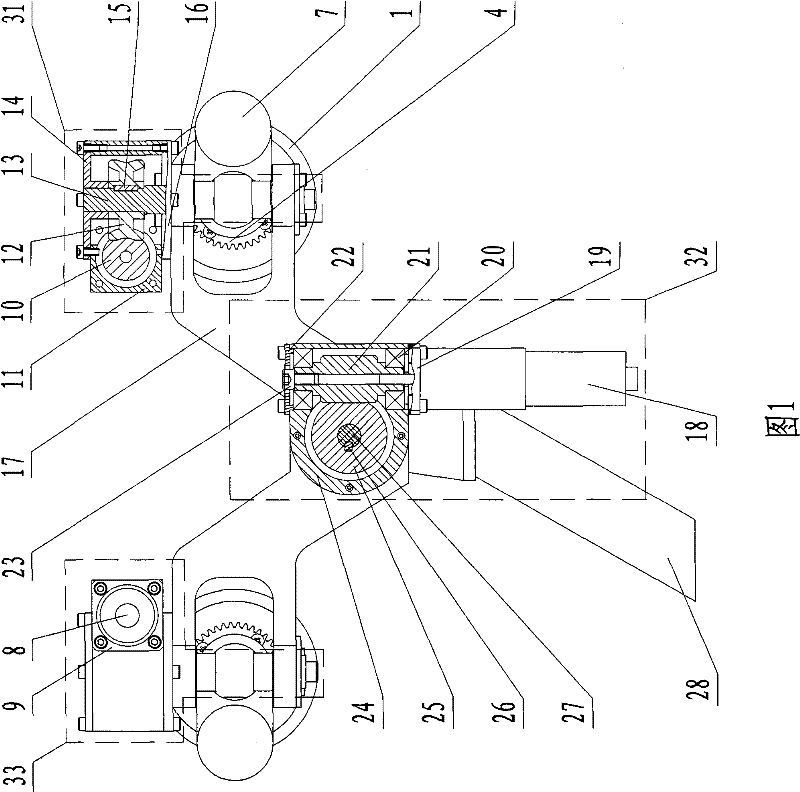
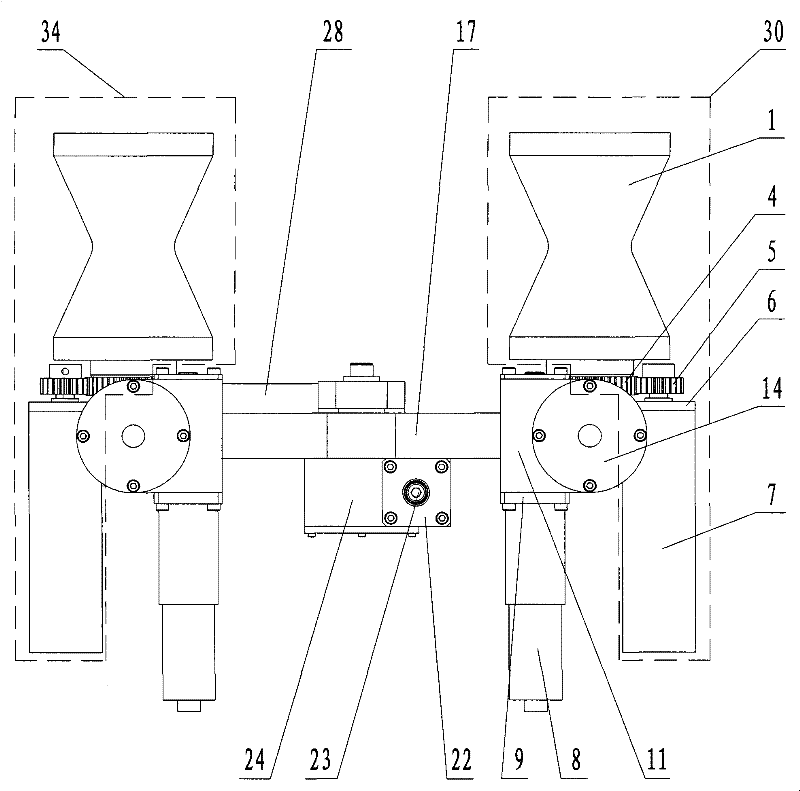
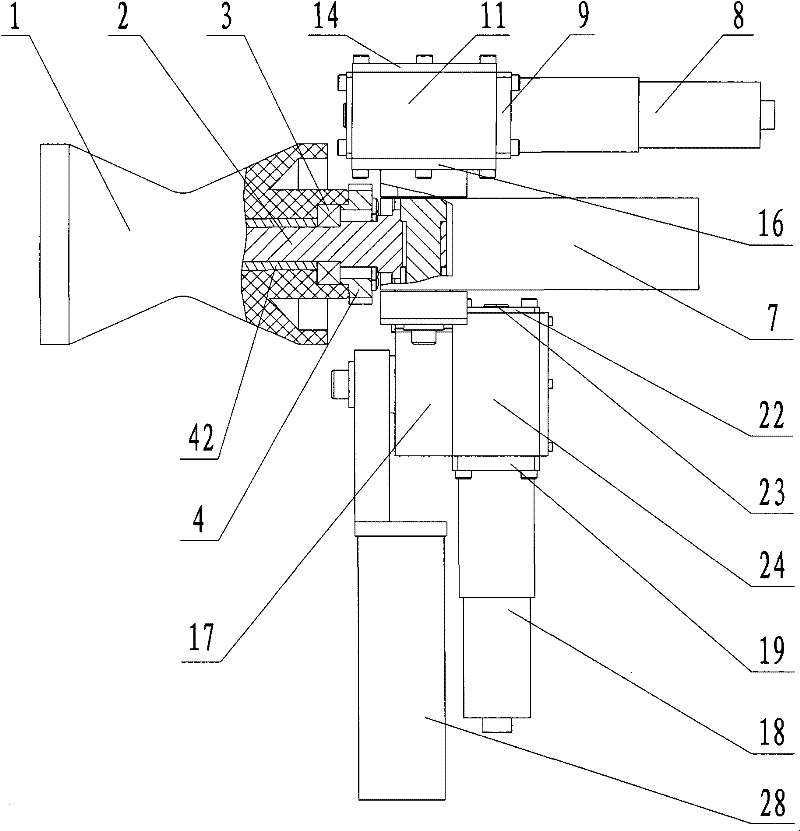
[0031] Such as Figure 1~4 As shown, the present invention is used to drive the inspection robot to carry out the inspection operation on the overhead transmission line, including the front traveling mechanism 30, the front deflection mechanism 31, the support 28, the lifting mechanism 32, the rear deflection mechanism 33 and the rear travel mechanism 34, and the support 28 is connected with the inspection robot, the lifting mechanism 32 is hinged on the support 28, the front and rear deflection mechanisms 31, 33 are symmetrically installed on the two ends of the slewing frame 17 of the lifting mechanism 32, and the front and rear traveling mechanisms 30, 34 are respectively installed on the front , On the deflection shaft 13 of the rear deflection mechanism 31,33, it is linked with the front and rear deflection mechanisms 31,33.
[0032] Such as figure 1 ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More