

Motion adsorption unit of wall-climbing robot
A wall-climbing robot and adsorption device technology, applied in the field of robots, can solve the problems of complex suction cup structure, small suction force of a single suction cup, and inconvenient control, and achieve the effects of simple structure, overcoming the small suction force of suction cups, and convenient operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
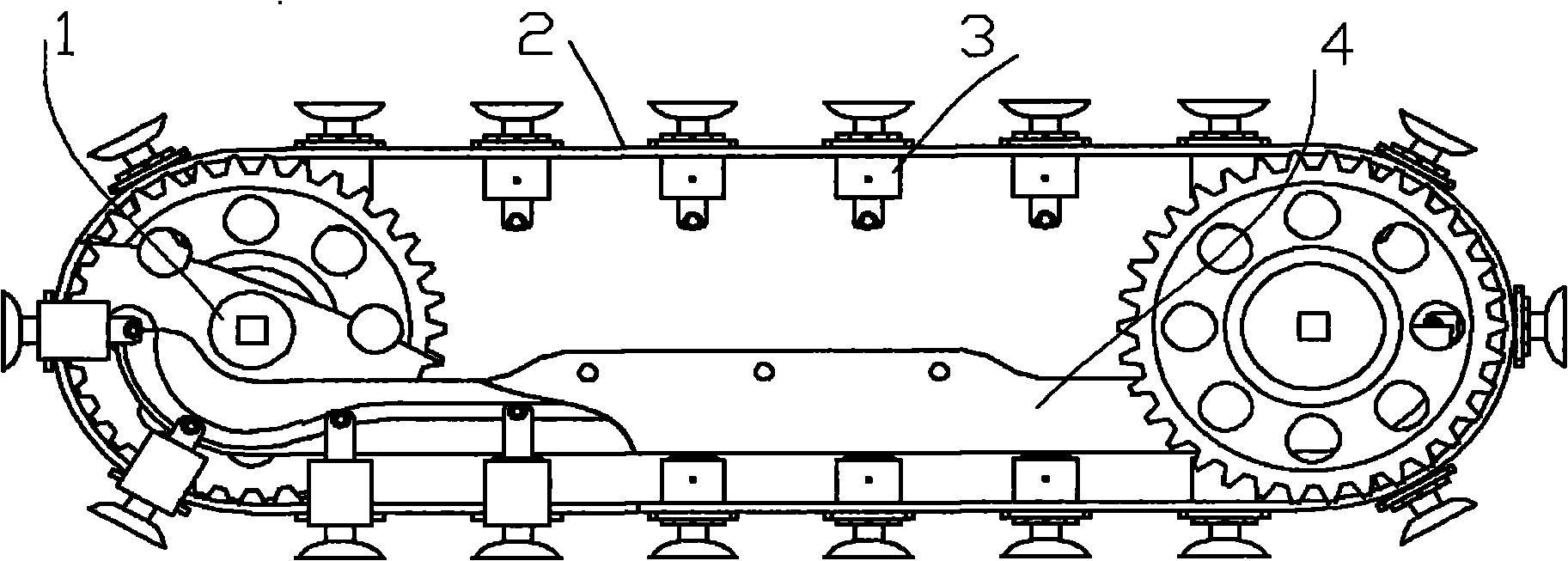
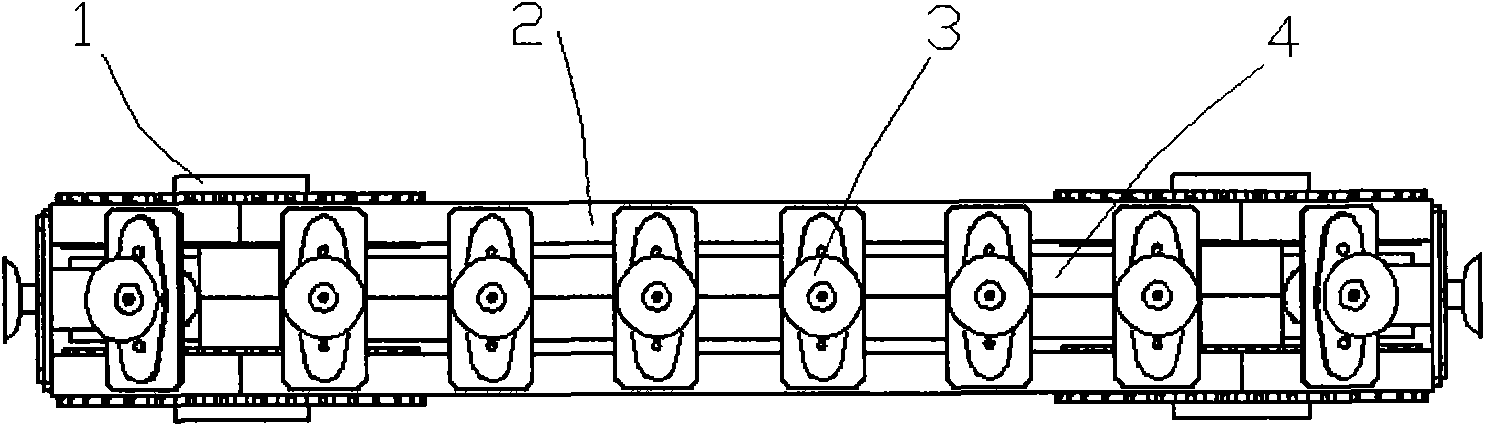
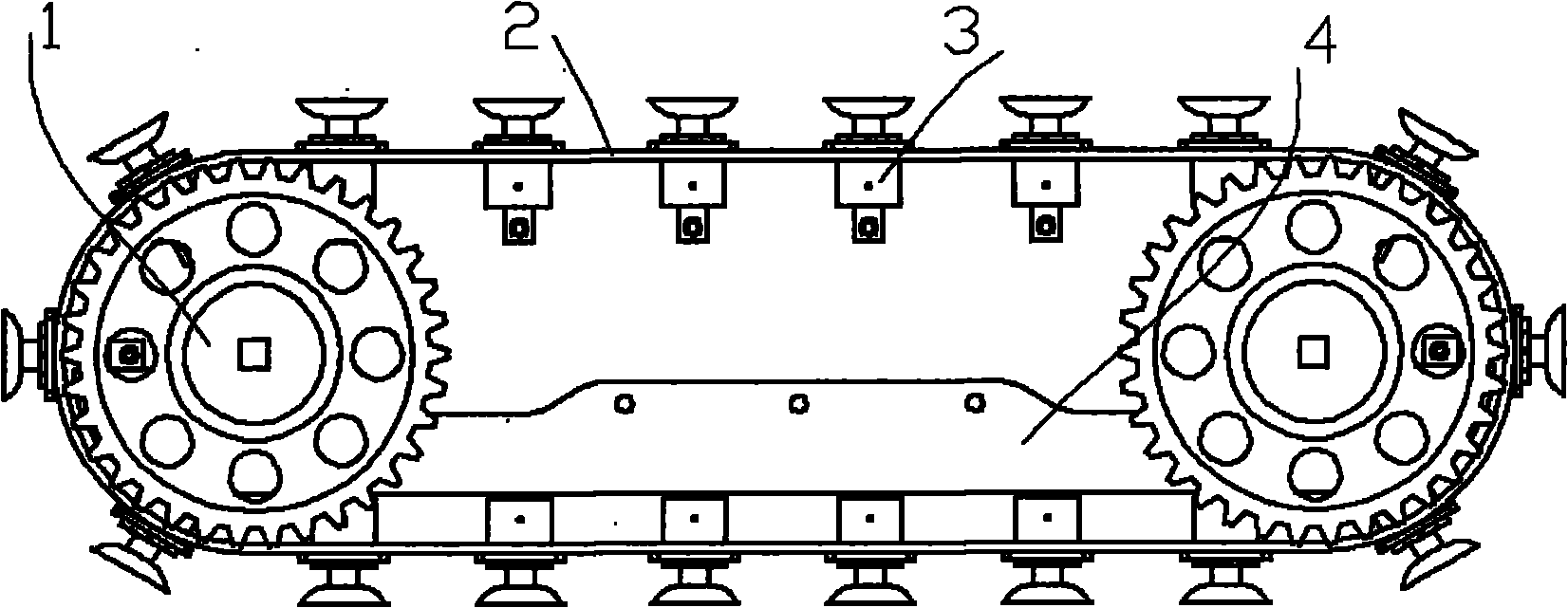
[0041] This embodiment is a motion adsorption device for a wall-climbing robot, which includes four driving wheels 1, four timing belts 2, a plurality of suction cup assemblies 3 and two moving cams 4, which are divided into two groups and symmetrically installed on the frame. In this embodiment, a group of mechanisms is taken as an example to describe in detail.
[0042] In each group, there are two driving wheels 1, respectively a driving wheel and a driven wheel; each driving wheel is made up of a pair of web type synchronous pulleys 5 and 6 with the same shape and structure but opposite directions. In order to prevent the synchronous belt 2 from shifting on the tooth 7, one end of the tooth surface of the tooth 7 of the synchronous pulley is higher than the other end, forming a limit tooth step 13 of the synchronous belt 2 . There are weight-reducing holes 9 and weight-reducing grooves 12 on the web of the synchronous pulley; there are flanges 11 at the center of the corre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More