

Strapdown inertial navigation method of dual quaternion based on frequency domain analysis method
A dual quaternion, frequency domain analysis technology, applied in the field of inertial navigation, can solve the problem of not fully compensating for various errors of the carrier motion, and achieve the effect of making up for the lack of accuracy, reducing the overall cost and improving the overall accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
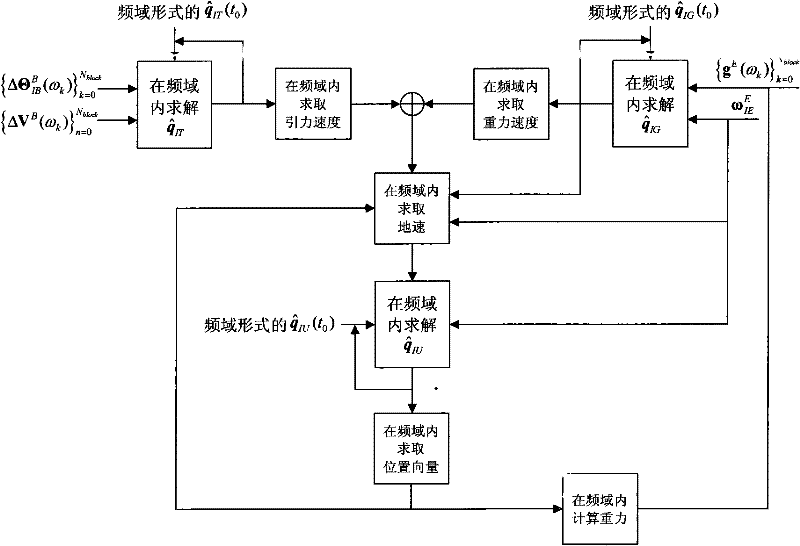
[0030]The realization process of the dual quaternion strapdown inertial navigation method based on the frequency domain analysis method of the present invention is as follows figure 1 As shown, it mainly includes the following six steps:
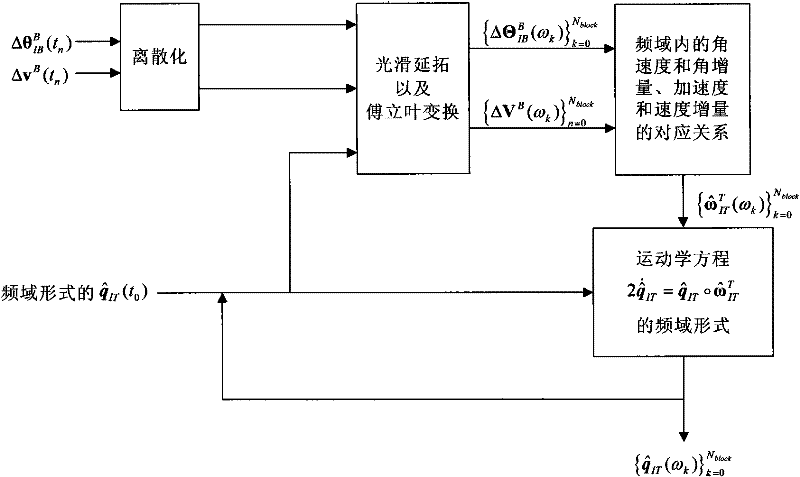
[0031] (1) Solve the dual quaternion in the frequency domain The kinematic equations and obtain the thrust velocity
[0032] Such as figure 2 As shown, first for Δθ IB B (t n ), Δv B (t n ) for smooth continuation (provided that the The compensation signal represents Δθ IB B (t n ), Δv B (t n ) compensation signal, where means t n dual quaternion of moment express time inertial navigation device output angle increment and velocity increment signal); then discrete Fourier transform is carried out to the obtained angle increment and velocity increment signal to obtain Δθ IB B (t n ), Δv B (t n ) spectrum amplitude And according to the corresponding relationship between angular velocity and angular increment, ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More