Six-dimensional position and orientation precision test method of space mechanical arm based on air flotation system
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A technology of a space manipulator and a testing method, which is applied in the direction of measuring devices, instruments, and optical devices, and can solve problems such as small joint drive torque, low arm stiffness, and ground testing problems
Inactive Publication Date: 2011-09-07
HARBIN INST OF TECH
View PDF0 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0003] Since the space manipulator is designed for the microgravity environment in space, its joint drive torque is small and the stiffness of the arm is low. However, due to the influence of gravity on the ground test, the six joints of the space manipulator cannot follow the plan. The path moves to the specified pose, which makes the ground test of the six-dimensional pose accuracy of the space manipulator a technical problem
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment approach 1
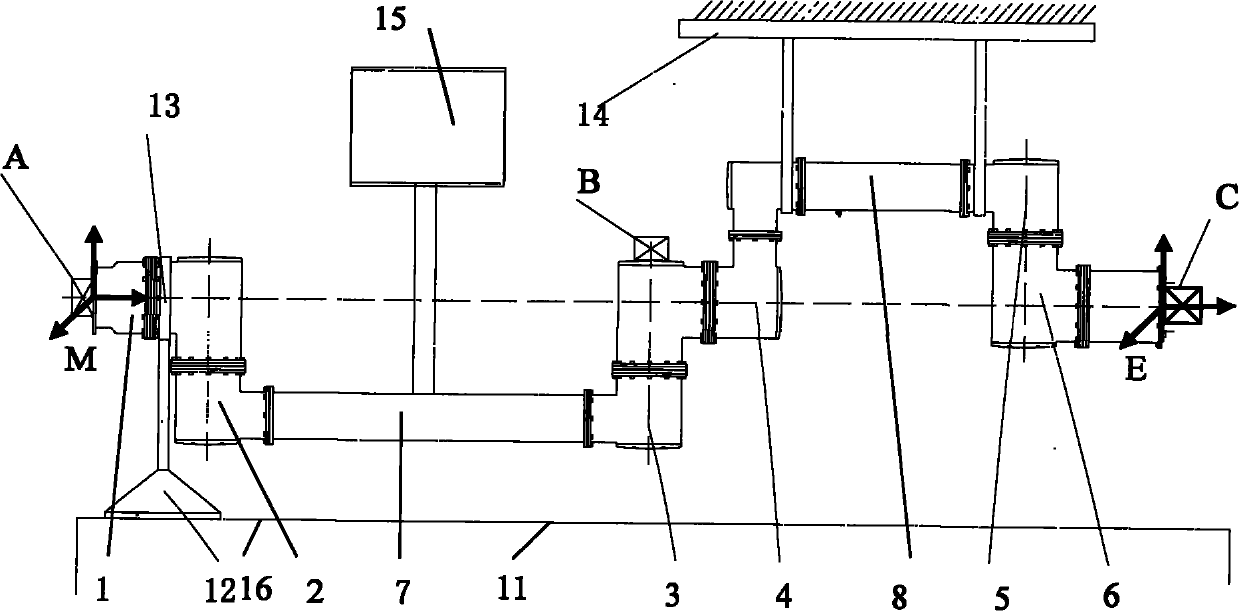
[0050] Specific implementation mode one: as figure 1 As shown, the tested space manipulator in the test method described in this embodiment consists of the first joint 1, the second joint 2, the first arm 7, the third joint 3, the fourth joint 4, the second arm 8, The fifth joint 5 and the sixth joint 6 are sequentially connected to form; the test method is realized based on an air flotation system including an air flotation platform 11, an air foot 12, a supporting wheel 13, a manipulator support frame 14 and a balance weight 15;
[0051] The concrete process of described test method is:
[0052] Step A, expand the space manipulator and install it on the air flotation system to simulate the microgravity environment, and install the 6D sensor in the 6D laser tracker:
[0053] Step A1, release the constraint of the base flange part of the space manipulator, and place the space manipulator released from the constraint on the upper end surface of the air-floating platform 11 (th...
specific Embodiment approach 2
[0103] Specific embodiment two: In step D of this embodiment, the specific process of six-dimensional pose accuracy calculation is as follows:
[0104] Step D1, calculate the absolute position accuracy of the six-dimensional pose of the space manipulator:
[0105] The combined absolute position error of the combined measured value of the k-th measured configuration i and j is:
[0106] E k ij = ( x k ij - x k ) 2 + ( y k ij - y k ) 2 + ( ...
specific Embodiment approach 3
[0117] Specific implementation mode three: as figure 1 As shown, in step A3 of this embodiment, a ball joint 16 is provided between the lower end of the air foot 12 and the air bearing platform 11 .
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention provides a six-dimensional position and orientation precision test method of a space mechanical arm based on an air flotation system, relating to a position and orientation precision test method of a space mechanical arm. In order to imitate a microgravity environment so as to test the position and orientation precision of the space mechanical arm at the ground, the method mainly comprises the following steps of: spreading the space mechanical arm and arranging the space mechanical arm on the air flotation system to imitate the microgravity environment; measuring and calculatingthe transformation matrix of a second target relative to a first target on an installation flange of the mechanical arm; measuring and calculating the transformation matrix of a third target relativeat the end of the mechanical arm relative to the second target; combining with the two position and orientation matrixes to obtain a coordinate transformation matrix of an end tool coordinate system E under a mechanical arm installing coordinate system M so as to test the position and the orientation of the end of the space mechanical arm; comparing the tested position and orientation with the theoretical position and orientation to obtain the position and orientation precision of the end of the space mechanical arm. The method imitates and reappears the space microgravity environment with the air flotation system, and guarantees the ground position and orientation precision tested by the developed space mechanical arm.
Description
technical field [0001] The invention relates to a method for testing the pose accuracy of a space manipulator, and relates to the technical field of space manipulator applications. Background technique [0002] With the advancement of technology, human activities are constantly expanding into space. According to statistics, an average of 80 to 130 satellites are launched each year in the world, but 2 to 3 satellites fail to enter orbit correctly, and among the satellites correctly entered orbit, 5 to 10 satellites are in the early stages of life (the first 30 days after orbit) ) that fails, which leads to huge economic losses. In order to recover the losses as much as possible, various countries are researching on-orbit service technology with space manipulators as the means of operation for the purpose of satellite maintenance and life extension. The current in-orbit services mainly include ORU (Orbital replacing unit) replacement, fuel supply, cleaning of abandoned satel...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.





 Login to View More
Login to View More  Login to View More
Login to View More