

Maneuvering target tracking method with organic combination of Kalman filtering and empirical mode decomposition
A technology of empirical mode decomposition and maneuvering target tracking, applied in complex mathematical operations and other directions, it can solve problems such as inaccurate calculation, IMF losing physical meaning, and limiting EMD applications, achieving high tracking accuracy and overcoming boundary effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0014] Specific implementation mode one: the maneuvering target tracking method that the Kalman filtering of the present implementation mode and empirical mode decomposition organically combine, and its specific process is as follows:
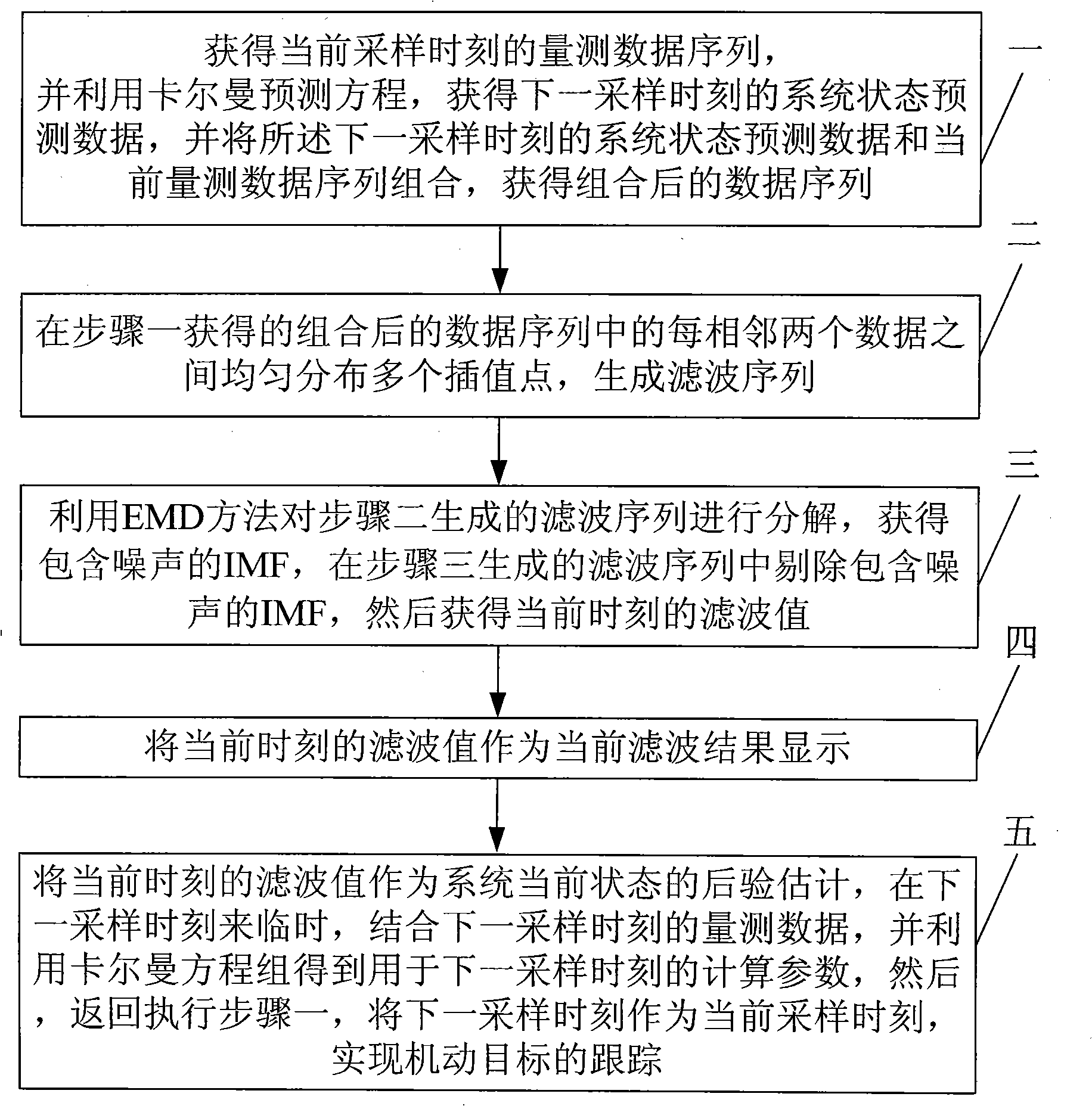
[0015] Step 1. Obtain the measurement data sequence at the current sampling moment, and use the Kalman prediction equation to obtain the system state prediction data at the next sampling moment, and combine the system state prediction data at the next sampling moment with the current measurement data sequence Combination, to obtain the combined data sequence;
[0016] Step 2, a plurality of interpolation points are uniformly distributed between every adjacent two data in the combined data sequence obtained in step 1, and a filter sequence is generated;
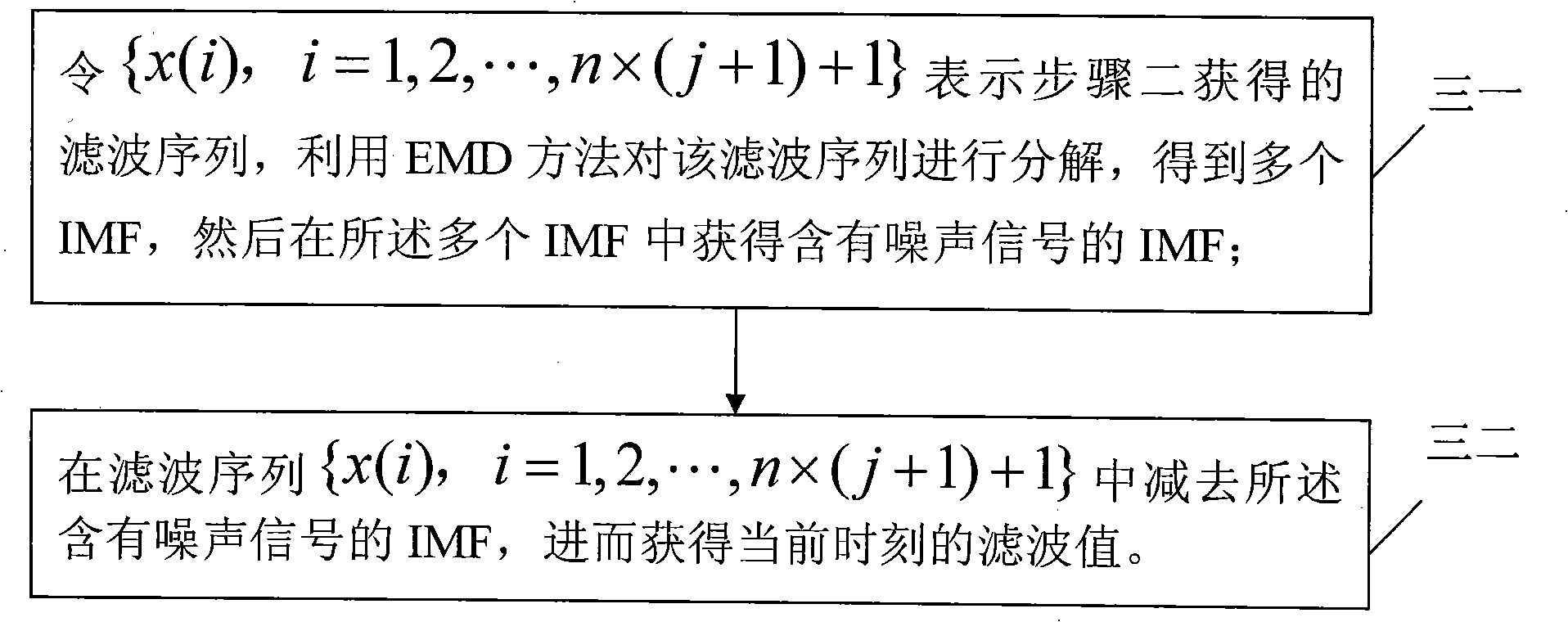
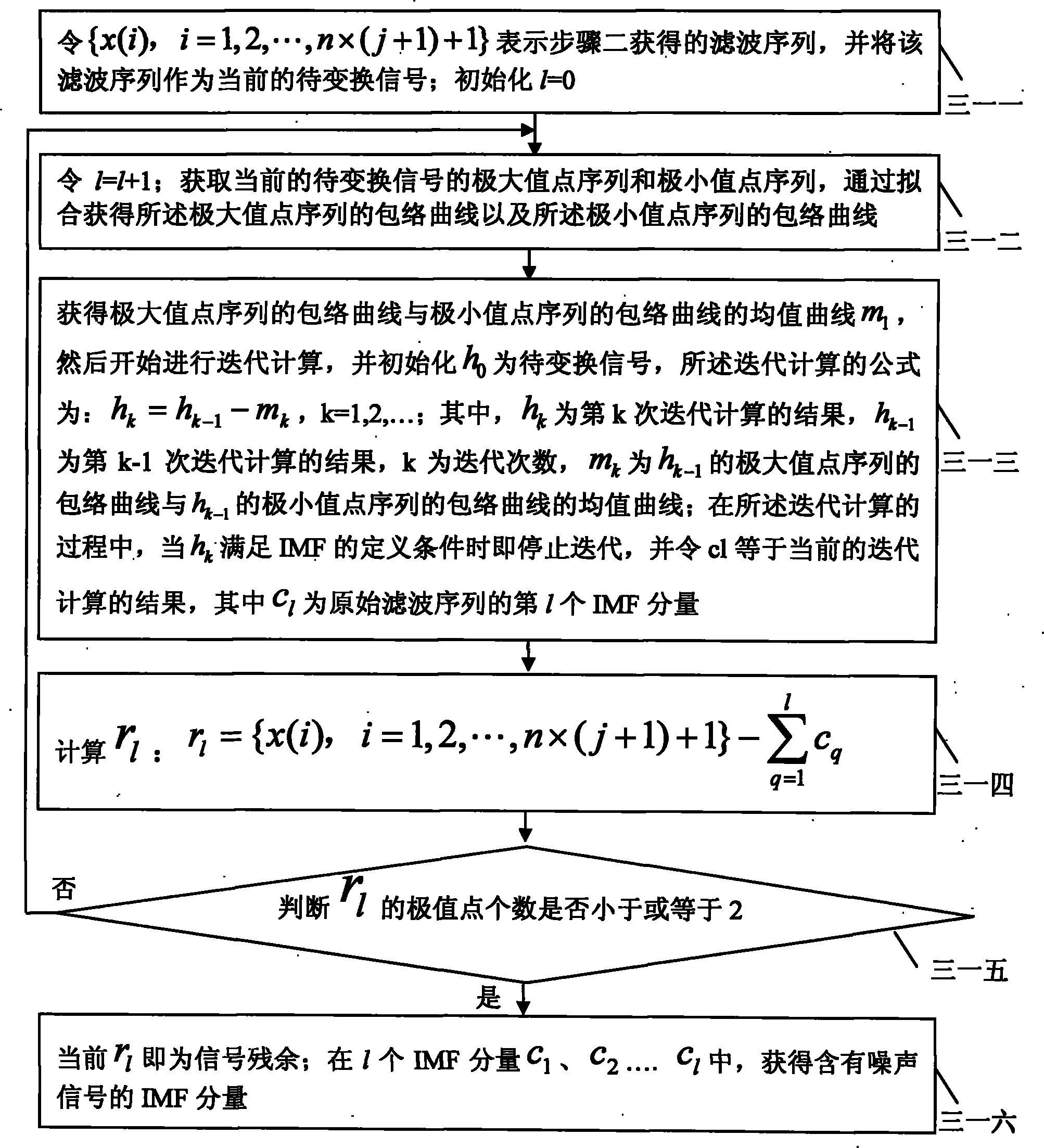
[0017] Step 3, using the EMD method to decompose the filter sequence generated in step 2 to obtain an IMF containing noise, remove the IMF containing noise in the filter sequence, and then obta...
specific Embodiment approach 2
[0022] Specific embodiment two: This embodiment is a further description of the maneuvering target tracking method of the organic combination of Kalman filtering and empirical mode decomposition in embodiment one. The process of the content described in step one is as follows:
[0023] At the sampling time t(n), n=1, 2, ..., the filtering system obtains the current measurement data sequence, and the length of the measurement data sequence obtained at each sampling time is N;
[0024] Use {y(i), i=1, 2, ..., N} to represent the measurement data sequence at time t(n), where y(N) is the system state measurement data sampled at time t(n), and y (N-1) is the system state measurement data obtained by sampling at time t(n-1), ..., y(1) is the system state measurement data obtained by sampling at time t(n-N+1);
[0025] The Kalman prediction equation is:
[0026] x ^ ( n + 1 | n...
specific Embodiment approach 3
[0033] Specific implementation mode three: this implementation mode is a further description of the maneuvering target tracking method that organically combines the Kalman filter and empirical mode decomposition of the first or second implementation mode, and the specific process of the content described in step two is:
[0034] make Indicates the combined data sequence obtained in step 1, where y(1), y(2), ... y(N) is the current measurement data sequence obtained in step 1 {y(i), i=1, 2, ..., N} N pieces of system state measurement data, The system state prediction data at the next sampling moment obtained for step 1;
[0035] exist j interpolation points are uniformly distributed between each adjacent two data in , j is a positive integer, and a filter sequence {x(i), i=1, 2, ..., n×(j+1)+1} is generated .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More