

Modularized multi-control Cartesian coordinate robot
A technology of rectangular coordinates and robots, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of lack of control objects, and achieve the effect of cultivating manipulative ability and innovative development ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Such as figure 1 The linear robot shown is provided with a motor 1, the motor 1 drives the ball screw 3 through the coupling 2, and the screw nut on the ball screw 3 drives the motion platform 4 to move linearly. The rotation of the motor 1 becomes a linear motion output.
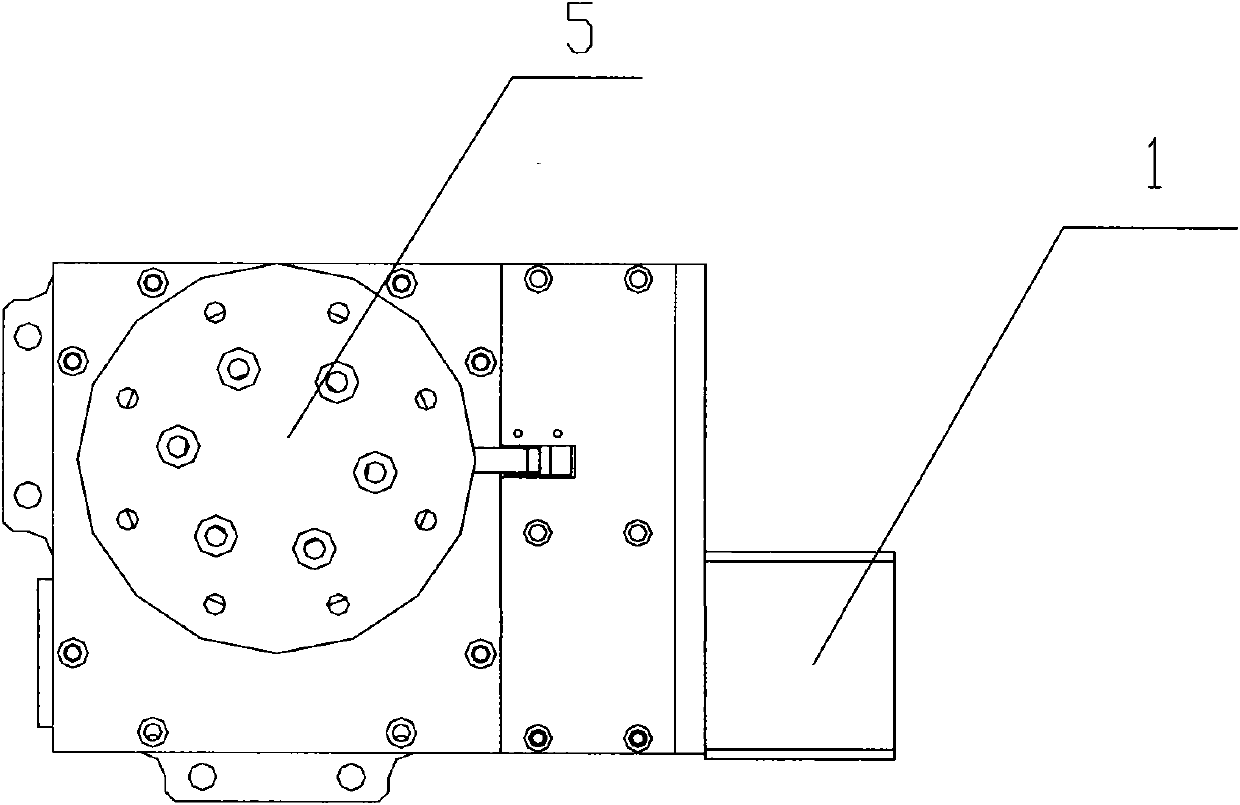
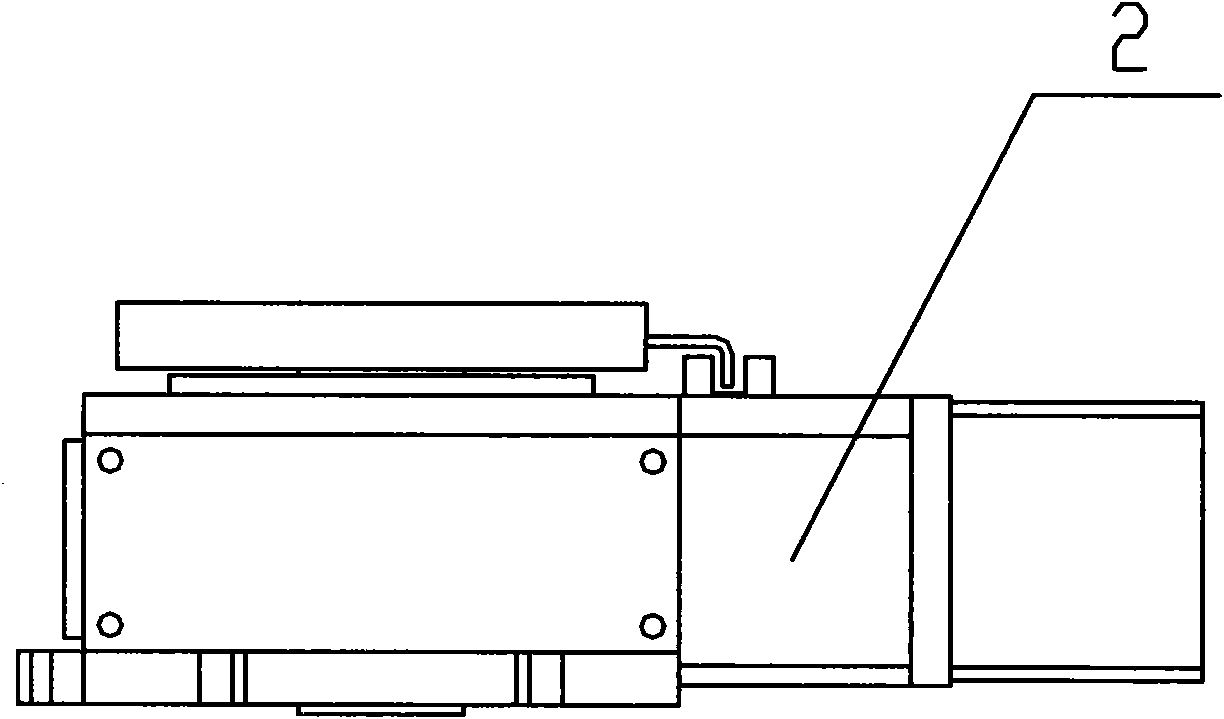
[0017] Such as figure 2 and image 3 The rotary robot shown is provided with a motor 1, and the motor 1 drives the worm gear through the shaft coupling 2, and the worm gear drives the rotation of the rotating platform 5. The rotation of the motor 1 is changed to rotate in another plane through the worm gear.
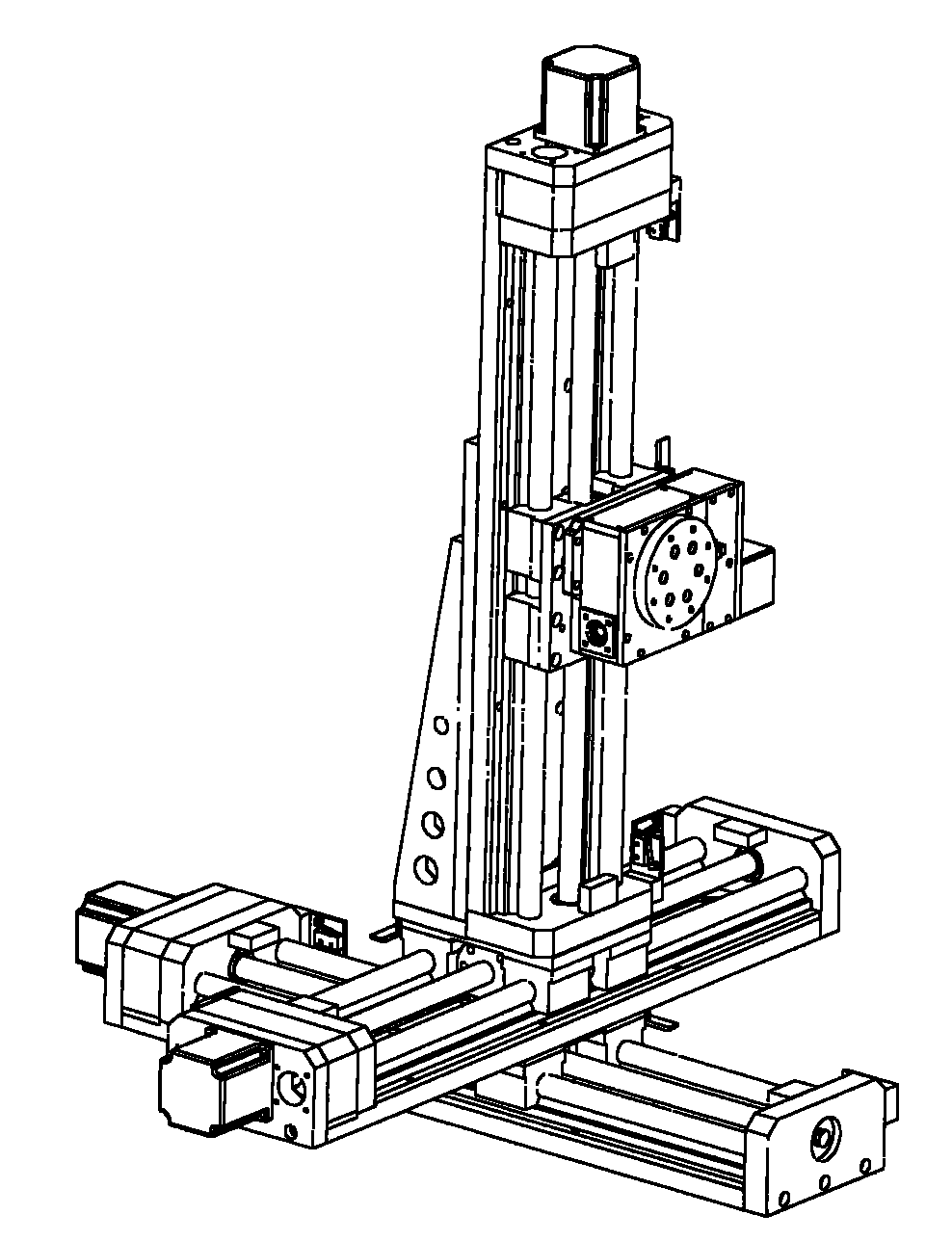
[0018] The following introduces some multi-degree-of-freedom Cartesian coordinate robots that appear through the combination of linear robots and rotary robots.
[0019] As shown in Figure 4(a), it is a two-degree-of-freedom rectangular coordinate robot composed of two linear robots, which can move arbitrarily on a plane. As shown in Figure 4(b), it is a two-degree-of-freedom rectangular ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More