

Finger mechanism of robot hand
A technology of robotic hands and fingers, applied in the field of improving technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Hereinafter, embodiments of a finger mechanism of a robot hand to which the present invention is applied will be described with reference to the drawings.
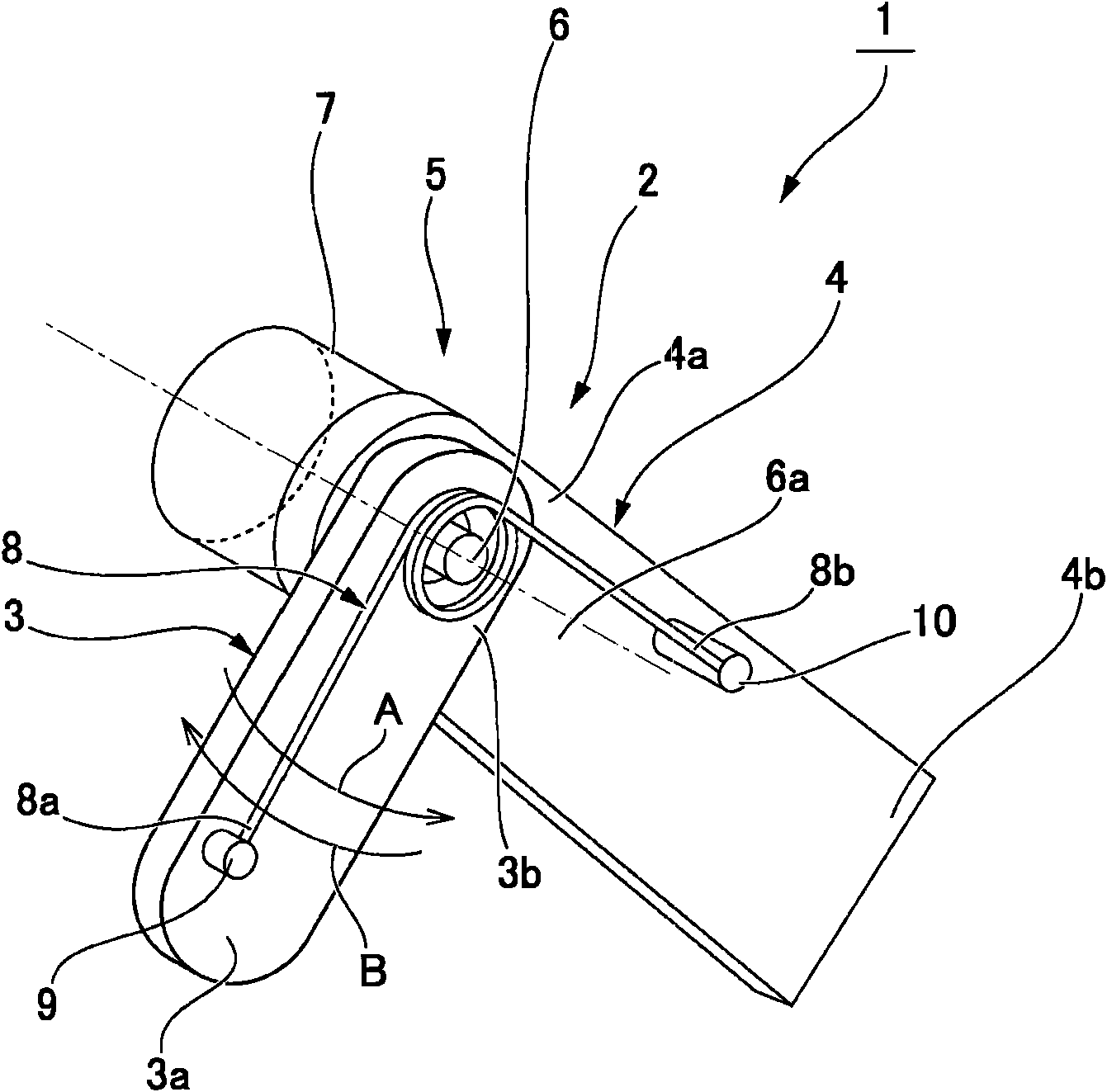
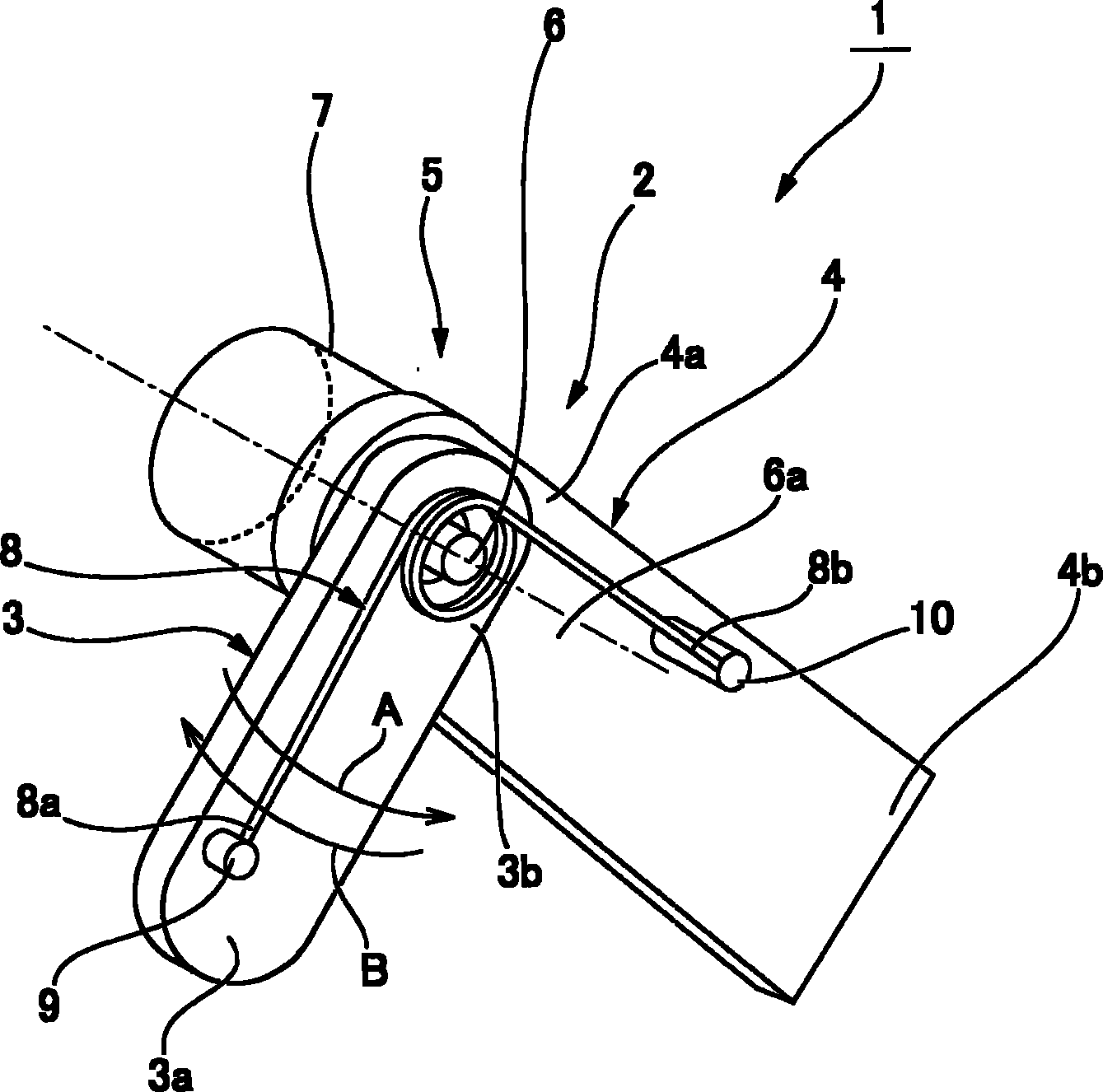
[0045] figure 1 It is an explanatory diagram showing main parts of the finger mechanism of the robot hand according to the present embodiment. The finger mechanism 1 of the robotic hand includes one or more fingers or finger units 2, and only one finger unit is shown in the figure. The finger unit 2 includes a tip-side finger link 3 , a base-side finger link 4 , and a finger joint 5 connecting the tip-side finger link 3 and the base-side finger link 4 .
[0046] The front finger link 3 is formed of, for example, an elongated plate member, and its rear end 3 b is connected and fixed to the finger joint in a state where the front finger link 3 extends in a direction perpendicular to the central axis 6 a of the finger joint shaft 6 . 5 for finger joint axis 6 . When the finger joint shaft 6 rotates, the front finger...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More