

Three-dimensional imaging measurement system combining planar array imaging with laser scanning
An area array imaging and measurement system technology, which is applied in the directions of measuring devices, photogrammetry/video metrology, surveying and navigation, etc., can solve the problems of difficult real-time rendering and processing of laser point cloud data, complex calculation formulas, and complex image coordinate formulas and other issues, to achieve real-time fast rendering, save calibration work, and improve the effect of superiority
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
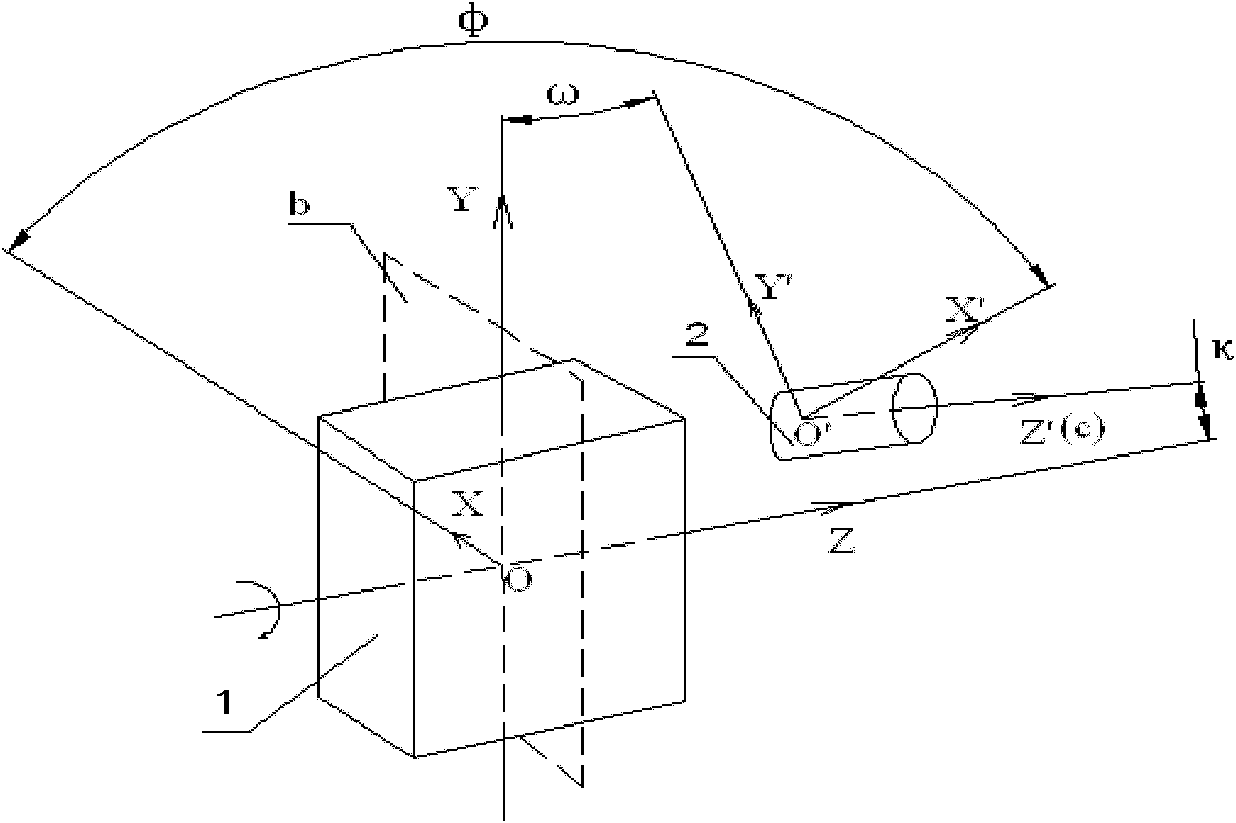
[0037] figure 2 Among them, the scanning surface b of the laser scanning device 1 is vertical to the main optical axis c of the camera A2 of the area array imaging equipment, and the two rotation angles φ and κ are both 0 degrees, which can be completed only after one rotation and one translation transformation The transformations of the two coordinate systems match. The rotation matrix formula can be simplified from formula (1) to formula (3):
[0038] R = R ω = 1 0 0 0 cos ω - sin ω 0 sin ω cos ω ...
Embodiment 2
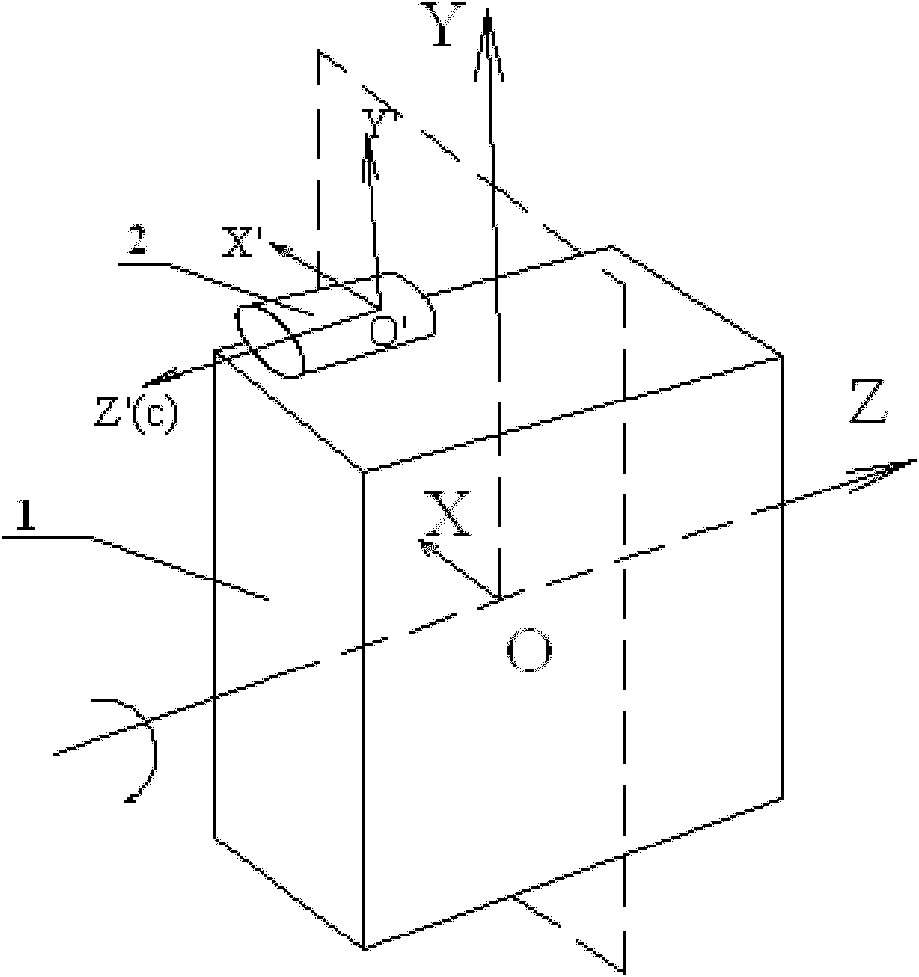
[0044] like image 3 As shown, the laser scanning device 1 is combined with a single area array imaging device camera A2. The laser scanning coordinate system takes the scanning center as the origin 0, the motor rotation axis as the Z axis, and the local coordinate system XYZ established as the Y axis vertically upward; the camera The image space coordinate system obtained by taking pictures is based on the center of the camera image plane as the origin, the horizontal direction along the image plane is the X' axis, the vertical direction is the Y' axis, and the main optical axis is the Z' axis to establish the local coordinate system X'Y 'Z'. The scanning plane b of the laser scanning device 1 is parallel to the main optical axis c of the camera A2 of the area array imaging device, so that the two rotation angles ω and κ are both 0 degrees, so that only one rotation and one translation transformation can be completed The transformations of the two coordinate systems match. ...
Embodiment 3
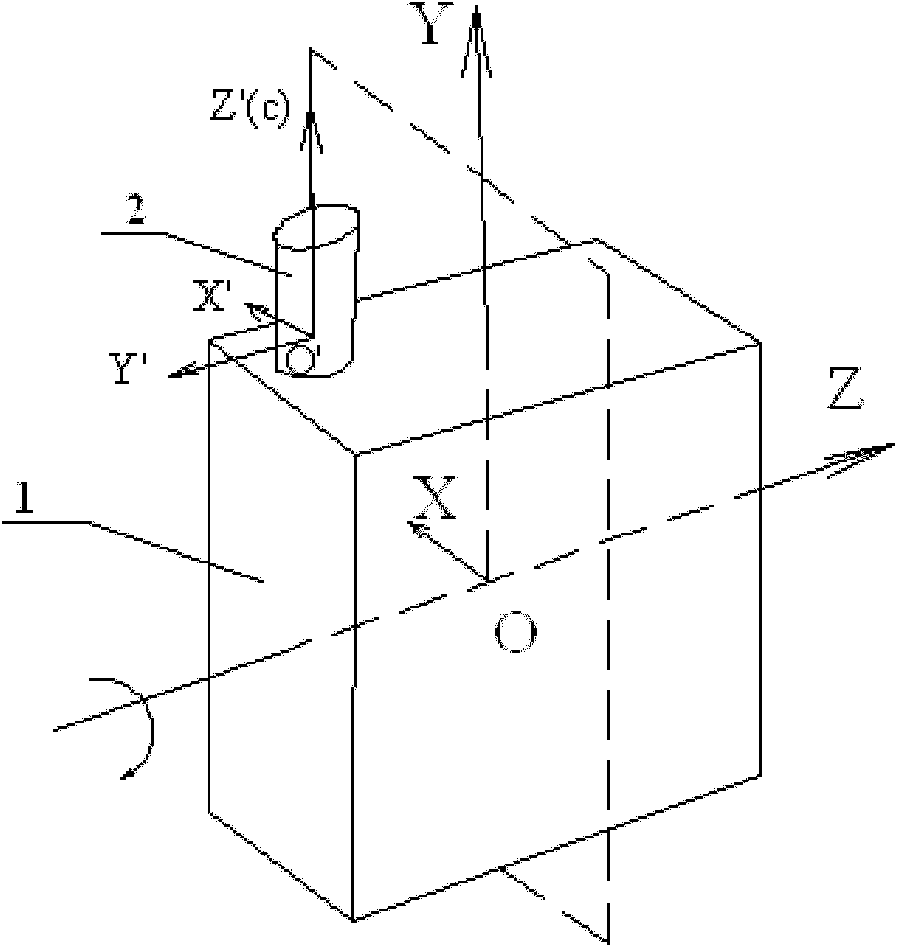
[0051] like Figure 4 As shown, the laser scanning device 1 is a three-dimensional imaging system combined with the area array imaging equipment camera A2 and the area array imaging equipment camera B3. The scanning coordinate system of the laser scanning device 1 takes the scanning center as the origin O, the motor rotation axis as the Z axis, and the local coordinate system XYZ established as the Y axis vertically upward; the image coordinate system obtained by the camera A2 of the area array imaging device is The center of the camera image plane is the origin, the horizontal direction along the image plane is the X' axis, the vertical direction is the Y' axis, and the main optical axis is the Z' axis to establish the local coordinate system X'Y'Z'. The image space coordinate system obtained by the area array imaging device camera B3 is based on the center of the camera image plane as the origin, the horizontal direction along the image plane is the X" axis, the vertical dir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More