

Telescopic four-link joint transmission mechanism based on parallelogram
A technology of parallelogram and transmission mechanism, which is applied in the field of robotics, can solve problems such as prominent output torque and unbalanced rotation speed of footed robot joints, hindering the design idea of hydraulically driven footed robot joints, and unfavorable realization of footed robot motion, etc., to achieve The effect of clear movement principle, convenient movement realization and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
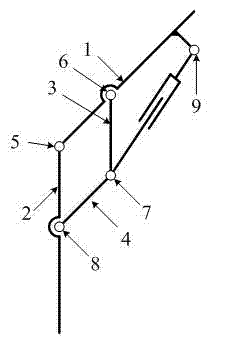
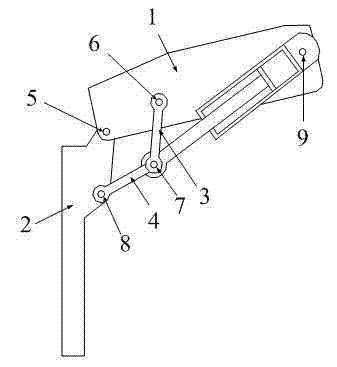
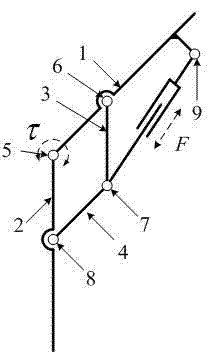
[0024] combine figure 1 , 2 , 3, 4-1, 4-2, 4-3, 5-1, 5-2, the present embodiment is a telescopic four-link joint transmission mechanism based on a parallelogram, comprising: the first rigid body 1, the second Rigid body 2, third rod 3, fourth rod 4.
[0025] like figure 2 Shown is an example diagram of a telescopic four-link joint transmission mechanism based on a parallelogram, in which one end of the first rigid body 1 is hinged to one end of the second rigid body 2, and the hinge point is called the first hinge point 5; one end of the third rod 3 is connected to the second A rigid body 1 is hinged in the middle, and the hinge point is called the second hinge point 6; the other end of the third rod 3 is hinged with one end of the fourth rod 4, and the hinge point is called the third hinge point 7; the other end of the fourth rod 4 is conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More