

Flexible four-DOF (Degree of Freedom) mechanical arm
A technology with a degree of freedom and manipulators, applied in the field of manipulators, can solve the problems of small parts, difficult to grasp, large manipulators, etc., and achieve the effect of high reliability, small size and high grasping accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
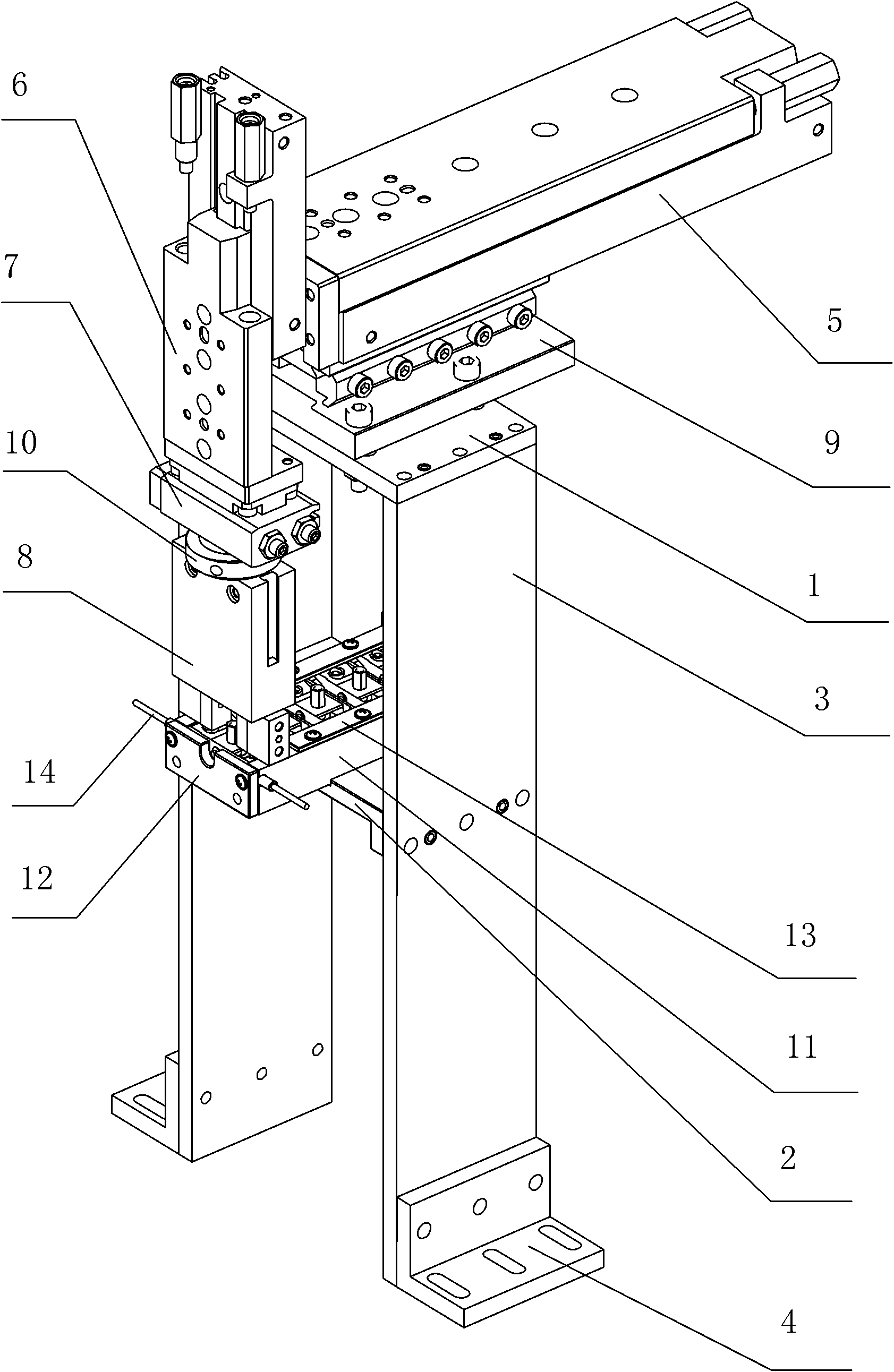
[0014] Embodiment one: the bottom of the horizontal displacement cylinder 5 is fixed on the connector 9, the connector 9 is fixed on the horizontal fixed plate 1 by bolts, the bottom of the vertical displacement cylinder 6 is fixed on one end of the horizontal displacement cylinder 5, and the vertical displacement cylinder 6 The end is fixed with a rotary cylinder 7, and the rotary cylinder 7 is fixed with parallel air claws through a flange 10.
Embodiment 2
[0015] Embodiment two: the bottom of the horizontal displacement cylinder 5 is fixed on the connector 9, the connector 9 is fixed on the horizontal fixed plate 1 by bolts, the bottom of the vertical displacement cylinder 6 is fixed on one end of the horizontal displacement cylinder 5, and the vertical displacement cylinder 6 The end is fixed with a rotary cylinder 7, and the rotary cylinder 7 is fixed with an inner clamping air claw 81 or a slotted air claw 82 through the flange 10.
Embodiment 3
[0016] Embodiment three: the bottom of the horizontal displacement cylinder 5 is fixed on the connector 9, the connector 9 is fixed on the horizontal fixed plate 1 by bolts, the bottom of the vertical displacement cylinder 6 is fixed on one end of the horizontal displacement cylinder 5, and the vertical displacement cylinder 6 The end is fixed with parallel air claws through the flange 10.
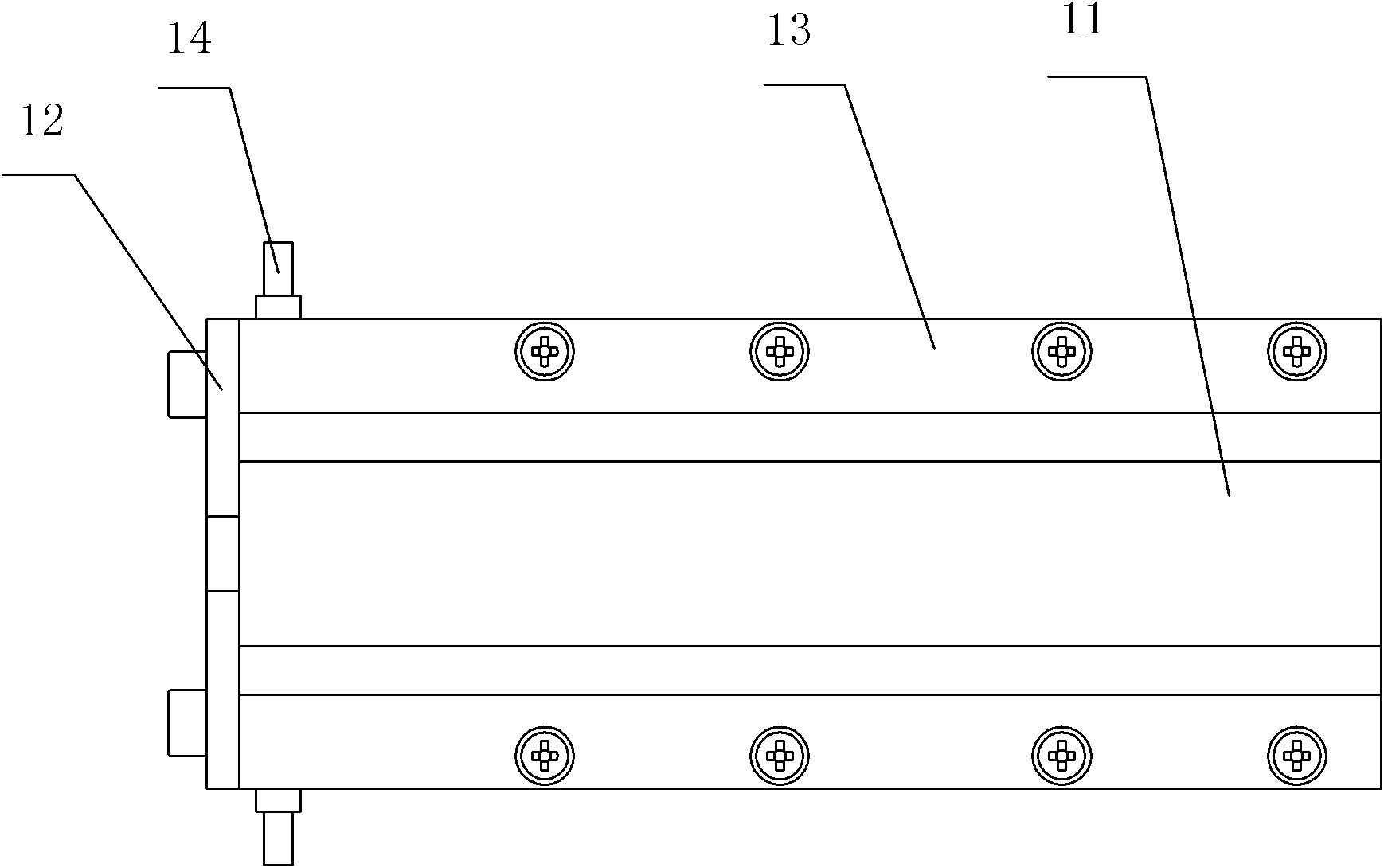
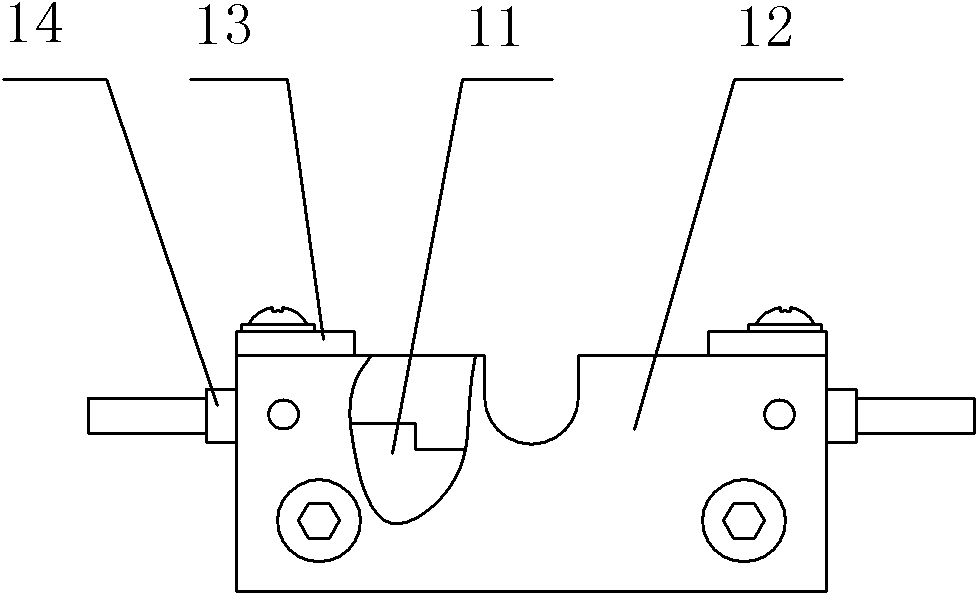
[0017] Working principle: as Figure 5 As shown, the vertical displacement cylinder 6 drives the air claw 8 to move downward to the storage pipe 11, the air claw 8 grabs the material, the vertical displacement cylinder 6 drives the air claw 8 to move upward, and when it moves to the top, the horizontal displacement cylinder 5 Drive the vertical displacement cylinder 6 to move forward to the specified position, and at the same time, driven by the rotary cylinder 7, the air claw 8 rotates 90°, the vertical displacement cylinder 6 drives the air claw 8 to move downward, and the air claw 8 put...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More