

Manipulator backpack type underwater robot
An underwater robot and manipulator technology, which is applied in the directions of underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of heavy thrust and unsuitability, and achieves increased support area, convenient grasping and placement, and improved space. The effect of utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Below in conjunction with accompanying drawing and embodiment thereof, the present invention is described in further detail;
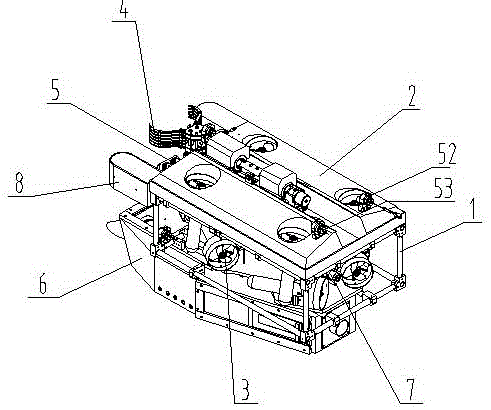
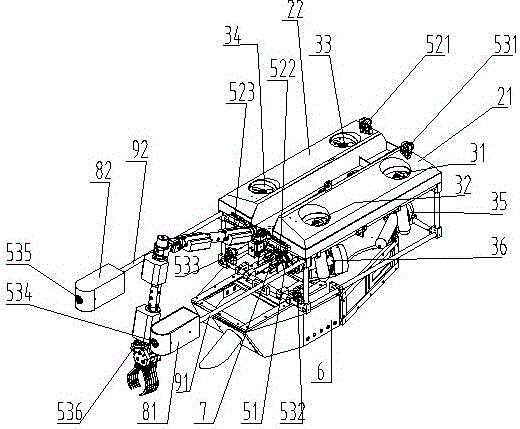
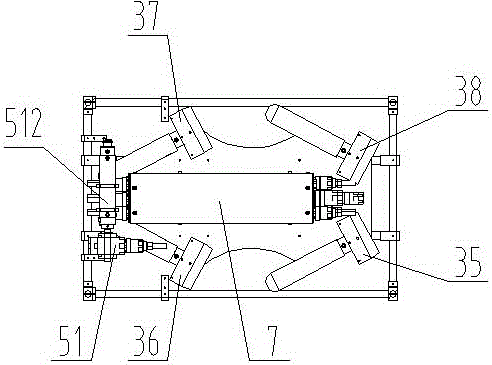
[0016] A backpack-type underwater robot with a manipulator, consisting of a main body frame 1, a buoyancy block system 2, a thruster system 3, a multi-joint manipulator 4, a camera and lighting system 5, a collection box system 6, a control chamber 7 and an auxiliary adjustment buoyancy block system 8 . The main frame 1 is connected and assembled by hollow pipe fittings; the buoyancy block system 2 includes a buoyancy block one 21 and a buoyancy block two 22. Block 2 22 is set on the right side of the top surface of the main frame 1 and is fixedly connected with the main frame 1; the multi-joint manipulator 4 is set on the upper front part of the main frame 1, and the end is movably connected with the main frame 1; the collection box system 6 is set on the main frame 1 The lower part is fixedly connected with the main frame 1; the control chamb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More