

Rolling robot
A technology of robots and rolling bearings, applied in the field of rolling robots, can solve the problems of inability to turn and realize complex gait, and achieve the effects of high rigidity, simple control and less degrees of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in conjunction with accompanying drawings.
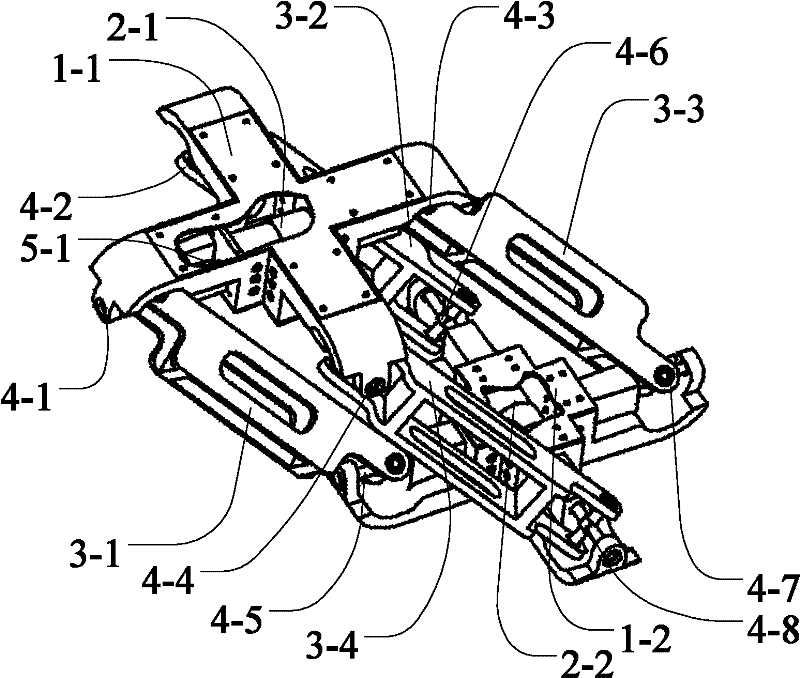
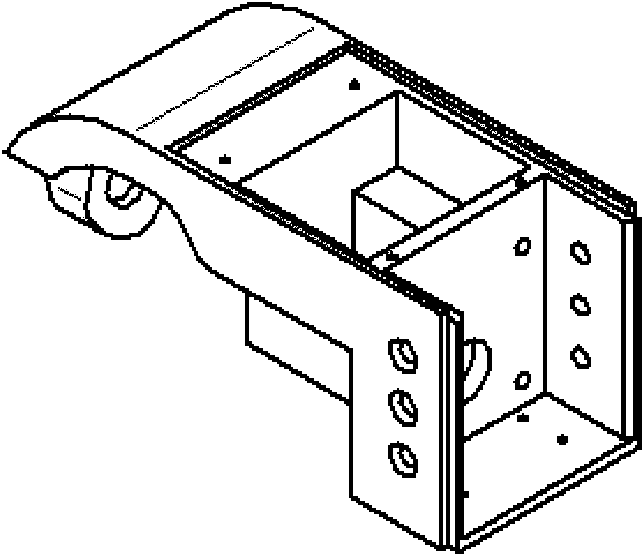
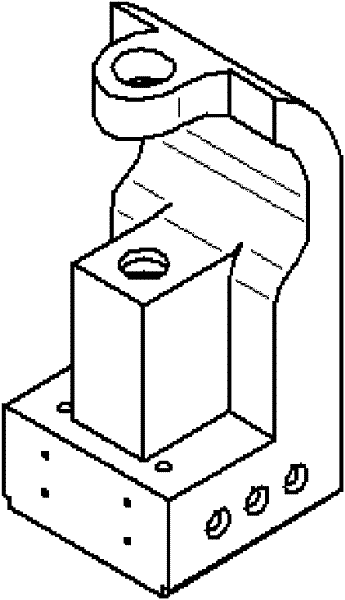
[0039] A rolling robot such as figure 1 As shown, the robot includes: first and second cross-shaped members 1-1, 1-2; first to fourth connecting rods 3-1, 3-2, 3-3, 3-4; first to fourth Eight cross shafts 4-1, 4-2, 4-3, 4-4, 4-5, 4-6, 4-7, 4-8; first and second drive motors 2-1, 2-2; First and second shaft couplings 5-1, 5-2; the connection between the described parts is:
[0040] The s end of the first cross shaft 4-1 is inserted into the seventeenth rolling bearing 8-17 of the first cross member 1-1, and the t end of the first cross shaft 4-1 is inserted into the second end of the first connecting rod 3-1. In the rolling bearing 8-2, the u end of the first cross shaft 4-1 is inserted into the first rolling bearing 8-1 of the first connecting rod 3-1, and the v end of the first cross shaft 4-1 is inserted into the first cross member 1 -1 Eighteenth rolling bearing 8-18, such...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More