

Four-degree-of-freedom decoupling hybrid robot
A technology with a degree of freedom and a robot, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as small working space, complex structure, and poor dynamic response performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
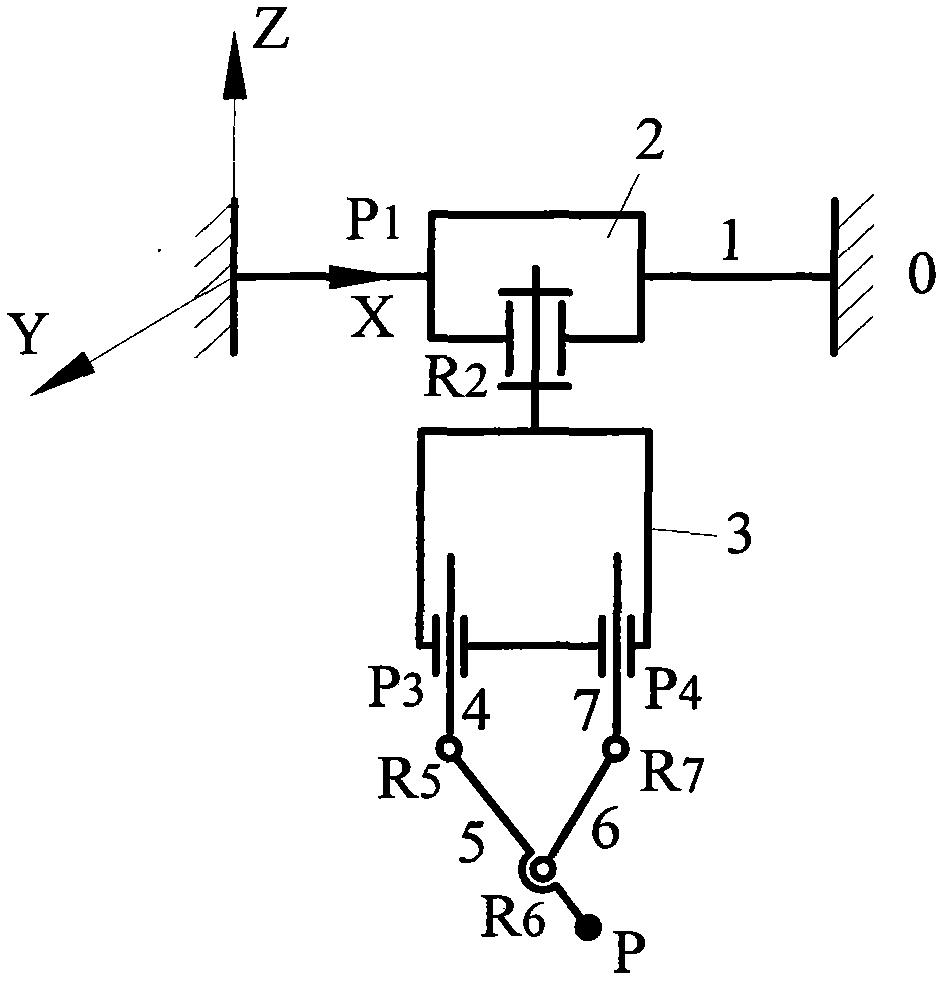
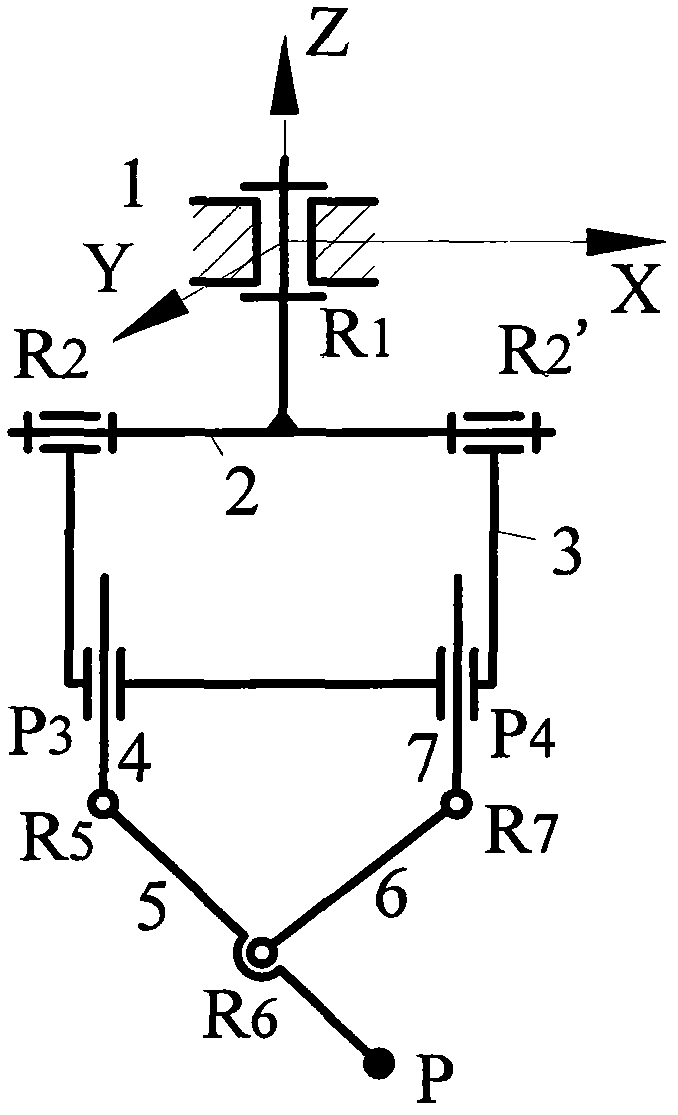
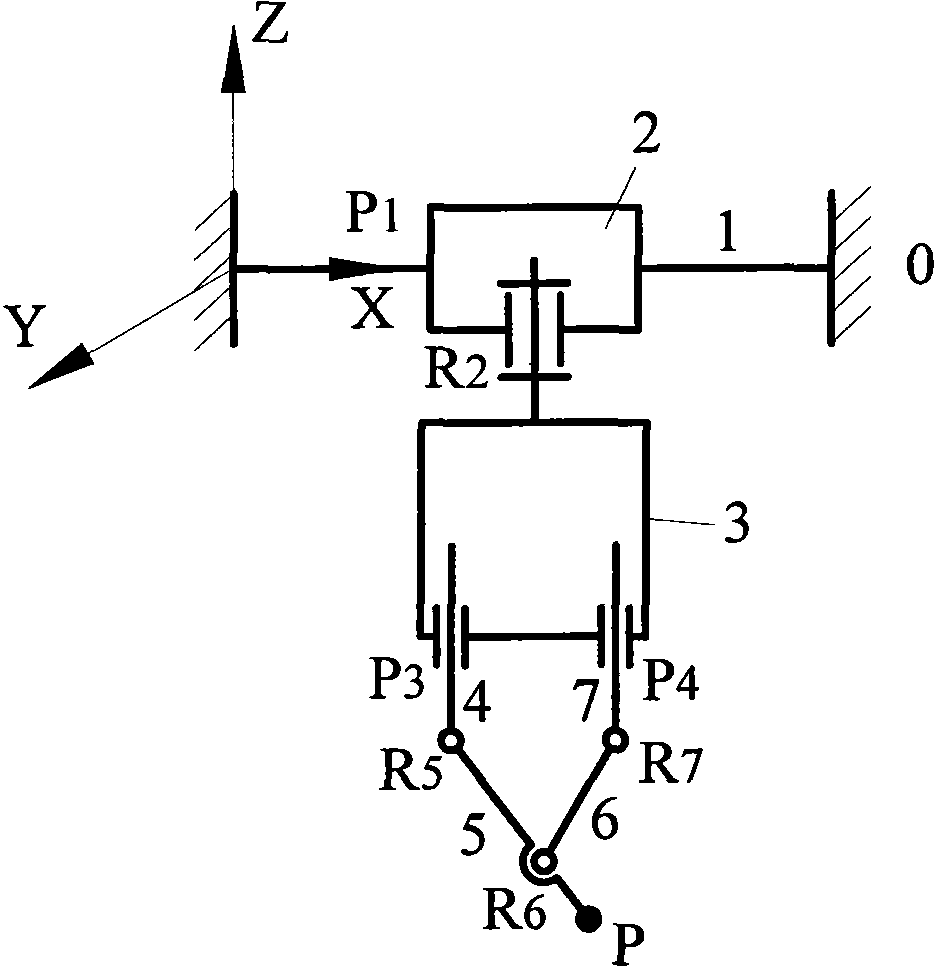
[0008] attached figure 1 It is a schematic diagram of the first structure of the embodiment of the present invention. A four-degree-of-freedom decoupling hybrid robot, including a frame 0, a guide rail 1, a slider 2, a large rotating arm 3, and a two-degree-of-freedom planar parallel mechanism operator P 3 -R 5 -R 6 -R 7 -P 4 , slider 2 to move vice one P 1 After being connected with the guide rail 1 fixed on the frame 0, the rotating pair R 2 Connect the large rotating arm 3; install a two-degree-of-freedom planar parallel mechanism operator on the large rotating arm 3, that is, the component one 4, component two 5, component three 6, and component four 7 of the planar parallel mechanism operator are respectively rotated Deputy second R 5 , rotating pair three R 6 , rotating pair four R 7 After the connection, component 1 4 and component 4 7 move the secondary P 3 , mobile deputy three P 4 Connected with the large rotating arm 3, the movement plane of the operator ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More