

Three-degree-of-freedom decoupling hybrid robot
A degree of freedom and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor dynamic response performance, poor rigidity, and small working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
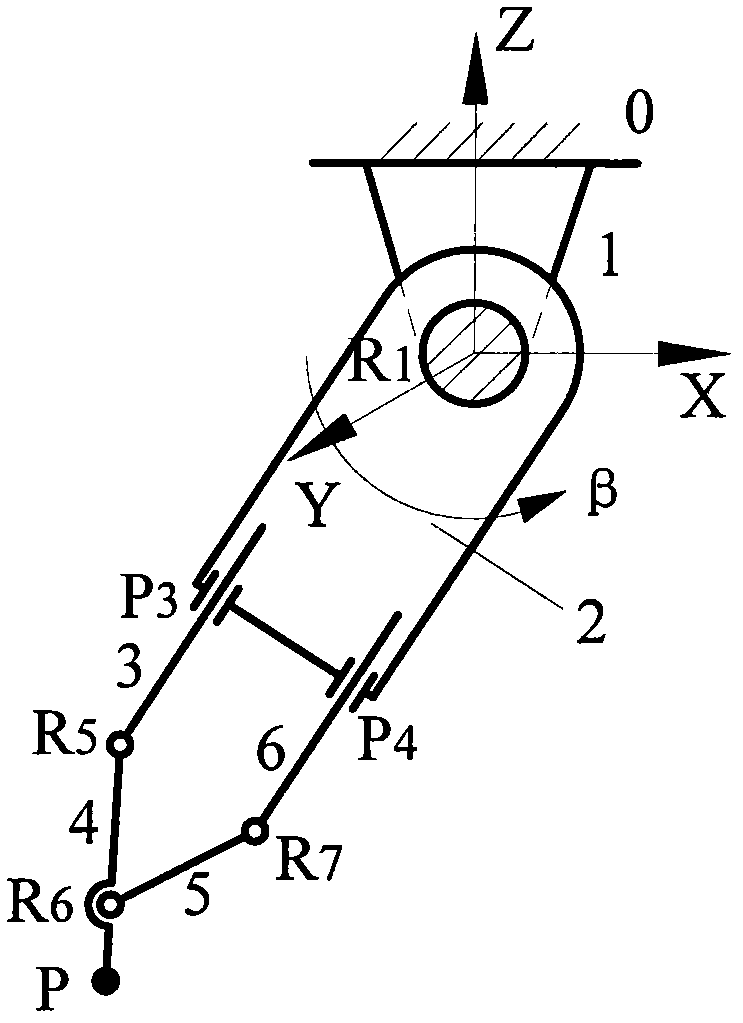
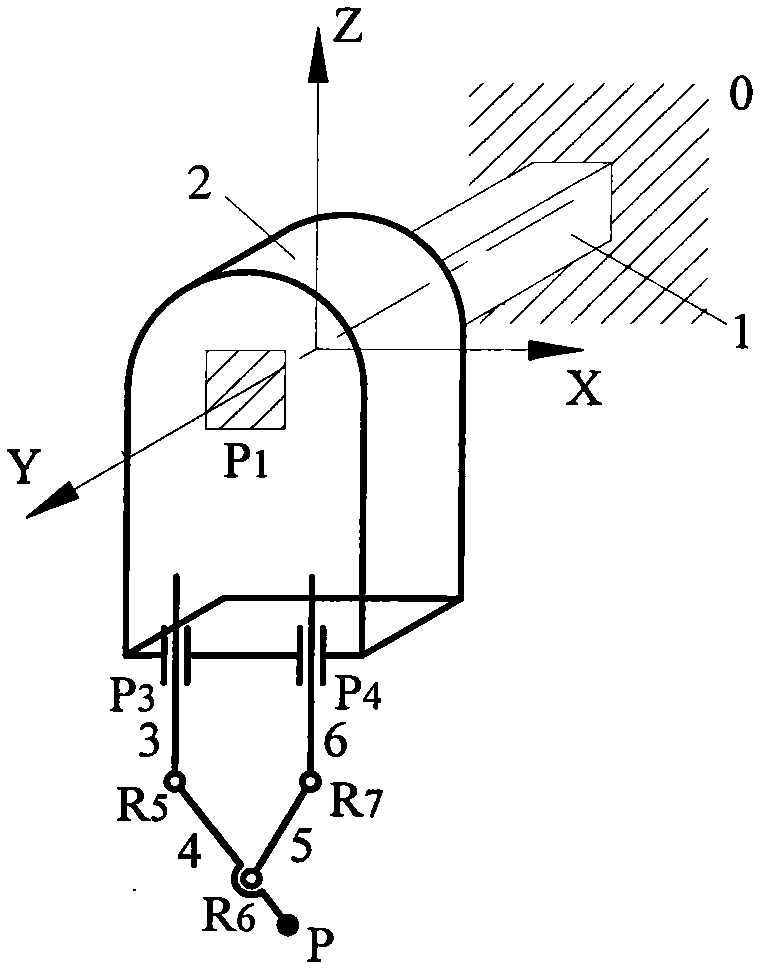
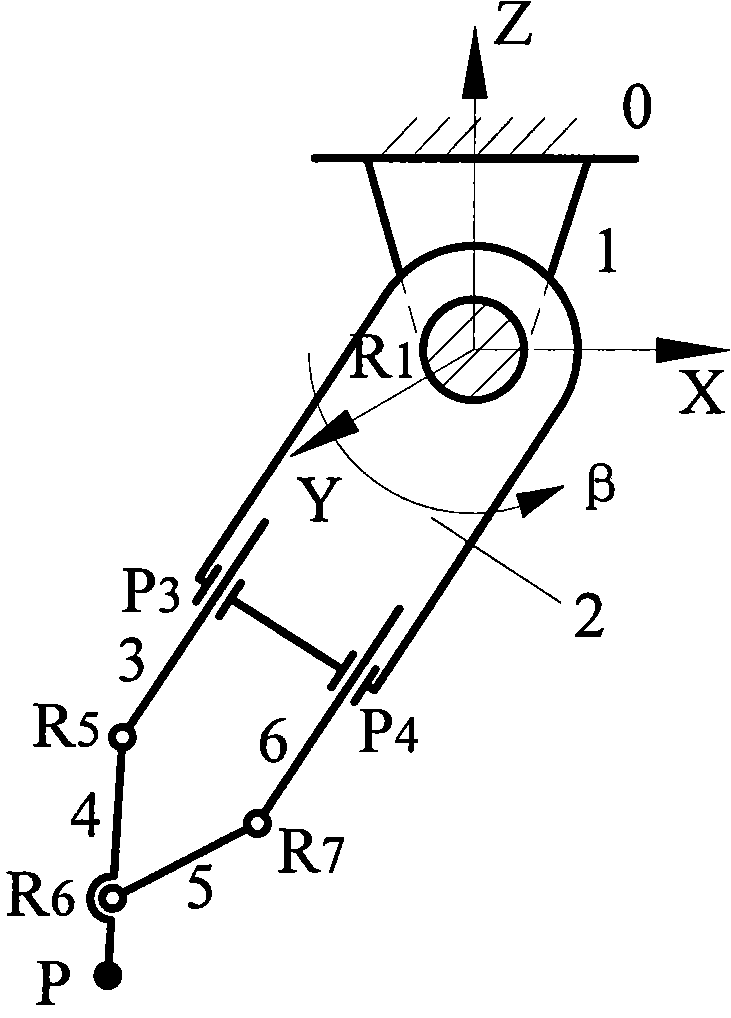
[0008] attached figure 1 It is a schematic diagram of the first structure of the embodiment of the present invention. A three-degree-of-freedom decoupling hybrid robot, including a frame 0, a suspension frame 1, a mounting arm 2, and a two-degree-of-freedom planar parallel mechanism operator P 3 -R 5 -R 6 -R 7 -P 4 , the mounting arm 2 is rotated by a R 1 Connect and fix the suspension frame 1 fixed on the frame 0, and install a two-degree-of-freedom planar parallel mechanism operator on the mounting arm 2, that is, component one 3, component two 4, component three 5, and component four of the planar parallel mechanism operator 6 respectively to rotate the second R 5 , rotating pair three R 6 , rotating pair four R 7 After the connection, component 1 3 and component 4 6 are respectively moved by the pair of P 3 , mobile deputy second P 4 Connected with the mounting arm 2, the movement plane of the operator of the two-degree-of-freedom planar parallel mechanism and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More