

Robust constraint flight control method of UAV (Unmanned Aerial Vehicle)
A technology of flight control and UAV, applied in the field of robust restricted flight control of UAV, to avoid failure and improve survivability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
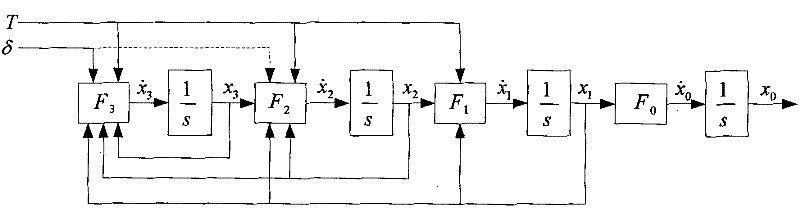
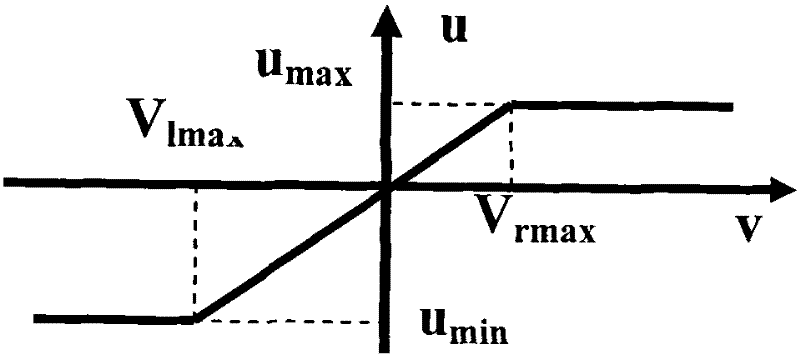
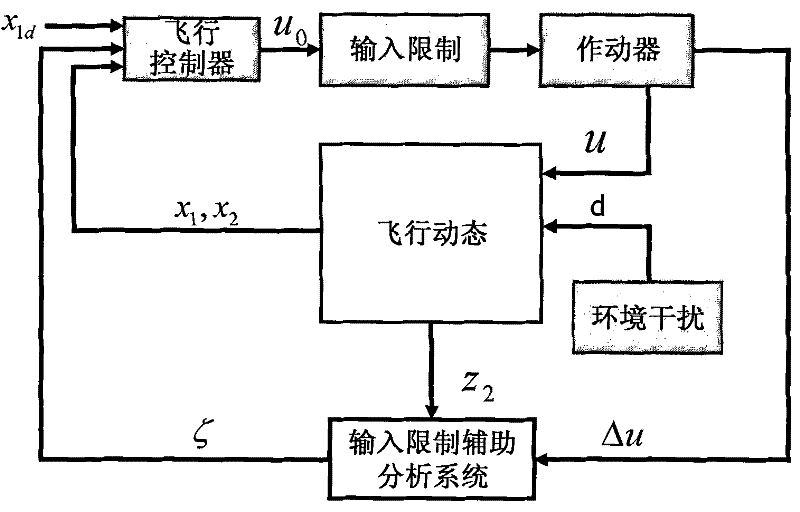
[0015] The robust limited flight control method for unmanned aerial vehicles of the present invention clearly takes into account the influence of limited control input in the design of the controller, thereby effectively avoiding the failure of the unmanned aerial vehicle's actuators, that is, the non-destructive effects on unmanned combat flight. Linear mathematical models and asymmetric restricted models are analyzed and established. On this basis, combined with Backstepping technology, an auxiliary analysis system with limited input is designed, and based on the state of the auxiliary analysis system with limited input, a nonlinear limited flight control scheme for UAV is designed. Below in conjunction with accompanying drawing, the present invention will be further described, and its specific embodiment comprises the following concrete steps:
[0016] 1. The establishment of a mathematical model for the uncertain flight of UAVs
[0017] Establishing the mathematical model...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More