

Self-localization method of intelligent wheelchair in corner areas
A self-positioning, wheelchair technology, applied in the field of positioning, can solve the problem of insufficient processor to plan the correct corner route, the distance is not accurate enough, etc., to achieve the effect of improving data accuracy and data accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with drawings and embodiments.
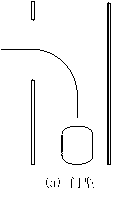
[0038] A self-positioning method for an intelligent wheelchair in a corner area, which includes a camera, a sonar sensor, a first Kalman filter and a second Kalman filter, and the steps are as follows:
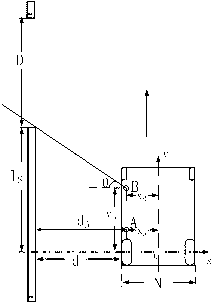
[0039] 1) The camera and sonar sensor collect the environmental information near the wheelchair, and record the distance between the detection position and the wheelchair as L c and L s ;
[0040] 2) The first Kalman filter is applied to the L collected by the camera c Carry out analysis and processing, correct the camera detection value, and obtain the estimated value L of the camera detection distance ck ;
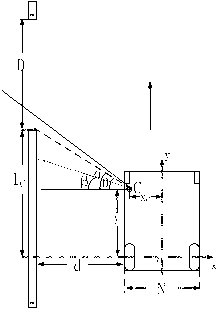
[0041] 3) Compare L ck with L s The value of is to exclude the sonar detection error data with large error L s , to correct the sonar detection value to obtain the estimated detection distance L of the sonar sensor sk ;
[0042] 4) Change the L ck with L...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More