

Throwable deformable micro-robot
A robot and miniature technology, applied in the field of robots, can solve the problems of insufficient structural strength and need to improve impact resistance, and achieve the effect of optimizing the structure layout, improving impact resistance and flexible movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be specifically introduced below in conjunction with the accompanying drawings and specific embodiments.
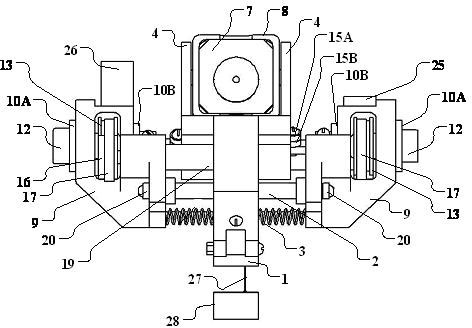
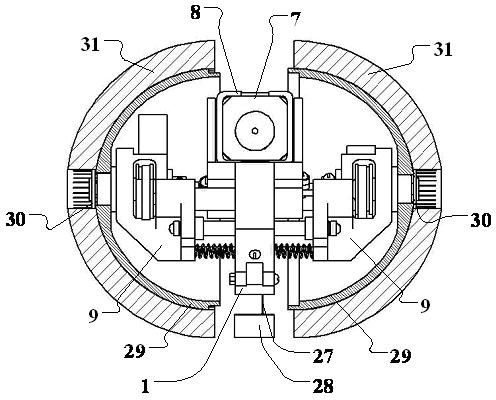
[0060] figure 1It is a schematic diagram of the overall structure of an embodiment of the present invention Figure 1 ; figure 2 It is a schematic diagram of the overall structure of an embodiment of the present invention Figure II ;
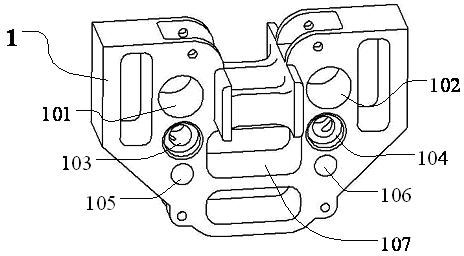
[0061] like figure 1 and figure 2 Shown: a miniature throwable deformable robot, including: a main mounting frame 1; a camera mechanism arranged on the top of the main mounting frame 1; two sliders 9 symmetrically arranged on both sides of the main mounting frame 1 to realize robot deformation; including The drive mechanism of motor 19 and rechargeable battery 23; Housing mechanism,
[0062] The main installation frame 1 is provided with a guide rail 2 and an elastic member in the horizontal direction, and the slider 9 is set on the guide rail 2 and connected with the elastic member at the same tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More